| [1] |
ZHAO Chongxin, CUI Jianbo, JIN Yanchao, HAN Yazhou, WU Gongpeng, HE Yan, WEI Zhenwen.
Numerical study on heat transfer characteristics of supercritical CO2 in vertical tubes at far-critical points
[J]. Shandong Science, 2025, 38(1): 83-95.
|
| [2] |
ZHANG Ruihan, JIANG Lewen, WANG Yue, HAO Zongrui.
Optimization of structural parameters and oil removal effect of a self-induced vortex oil collector
[J]. Shandong Science, 2024, 37(6): 12-21.
|
| [3] |
LI Shuangjiang, XIAO Feng, CHEN Wei, ZHANG Bin, ZHU Qing, WANG Zijie, WU yang.
Modeling, simulation and dynamic analysis of the energy stage of advanced adiabatic compressed air energy storage system
[J]. Shandong Science, 2024, 37(5): 42-54.
|
| [4] |
FENG Hao, WANG Jie, SUI Chunjie, CHEN Wei, ZHANG Bin.
Numerical simulation study of sistributed disc-type submerged combustion evaporator
[J]. Shandong Science, 2024, 37(4): 75-83.
|
| [5] |
ZHANG Haoran, CHEN Wei.
Study on gas-liquid phase equilibrium properties of ionic liquid absorption refrigeration working pairs and their molecular dynamics simulations
[J]. Shandong Science, 2024, 37(4): 84-92.
|
| [6] |
JIANG Jiahui, WANG Zijie, CHI Ran, CHEN Wei, XUE Xiaodai, ZHANG Tong, ZHANG Xuelin, ZHANG Bin.
Study on supercritical carbon dioxide energy storage system and its operating characteristics
[J]. Shandong Science, 2024, 37(4): 93-104.
|
| [7] |
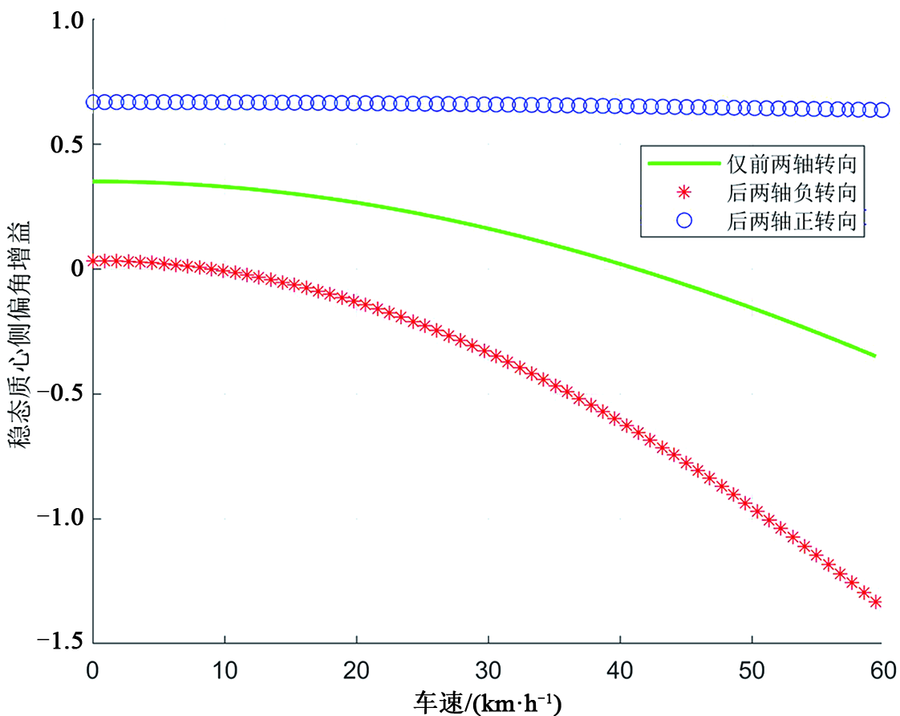
CHEN Zhitao, ZHOU Yi, LIU Xiangxin, BAI Jinyang, LIU Yang, WANG Zhenzhen.
Functional safety simulation analysis for multiaxle electro-hydraulic steering system based on Simulation X
[J]. Shandong Science, 2024, 37(3): 85-92.
|
| [8] |
LU Shoufeng, HUANG Zhikang, ZHAO Hongyun.
The evolution model and simulation of the viral load of subway passengers
[J]. Shandong Science, 2024, 37(2): 97-103.
|
| [9] |
ZHANG Guojian, MENG Hao, XIONG Wei, BAI Tao, MENG Xianchen, WANG Jun, LÜ Xiao.
Predicting surface movement and deformation for continuous mining and continuous backfilling under an artificial lake
[J]. Shandong Science, 2023, 36(5): 33-43.
|
| [10] |
XIE Yi, ZHANG Jing, SUN Jinqiang, LIU Xiaochan, YI Xibin, SUN Yongxing.
Molecular dynamics simulation and gas adsorption properties of CO2/CH4 adsorbed using Mg-MOF-74
[J]. Shandong Science, 2023, 36(3): 123-134.
|
| [11] |
LIU Lihua, WEN Daosheng, WANG Shouren, NIU Jintao, SONG Qiang, YIN Ziqiang.
Effect of heat treatment on the organization and properties of TiAl-based alloy shot-peened specimens
[J]. Shandong Science, 2023, 36(2): 59-68.
|
| [12] |
WANG Xin, WU Pingwei, HUANG Wei, DAI Jinhui.
Balance stance analysis of a single-point-mooring submerged buoy system for performing electromagnetic measurements
[J]. Shandong Science, 2023, 36(1): 1-9.
|
| [13] |
LI Peng-ju, QIAN Lin-gen, WU Qiang, HUANG Shan, CHEN Su.
Impact of foundation pit dewatering and excavation with suspended waterproof curtain on adjacent high-speed railway piers
[J]. Shandong Science, 2022, 35(6): 116-122.
|
| [14] |
TAN Yi-wei, LIU Shu-zhuo, CHEN Jun-sheng.
Calculation of human evacuation reliability for shield-integrated pipe gallery
[J]. Shandong Science, 2022, 35(4): 144-154.
|
| [15] |
DONG Hui,REN Xu-yun.
Analysis of hydrate and sand particle movement based on DEM-CFD coupling method
[J]. Shandong Science, 2022, 35(3): 123-130.
|
 ),LIU Xiang-xin(
),LIU Xiang-xin(