山东科学 ›› 2022, Vol. 35 ›› Issue (1): 99-106.doi: 10.3976/j.issn.1002-4026.2022.01.013
李正( ),刘相新(),黎兰
),刘相新(),黎兰
LI Zheng(),LIU Xiang-xin(),LI Lan
摘要:
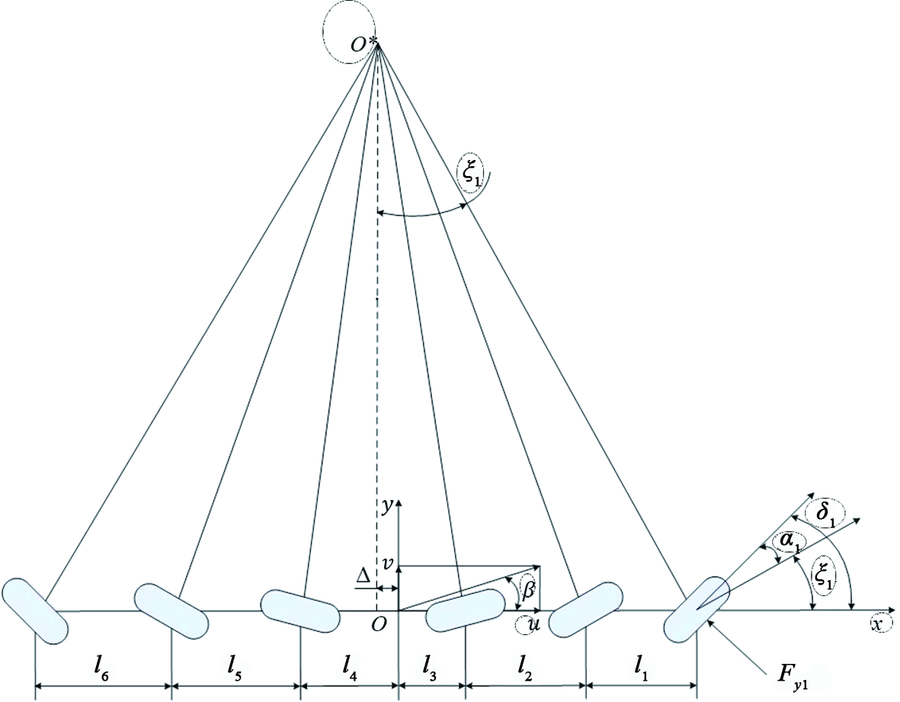
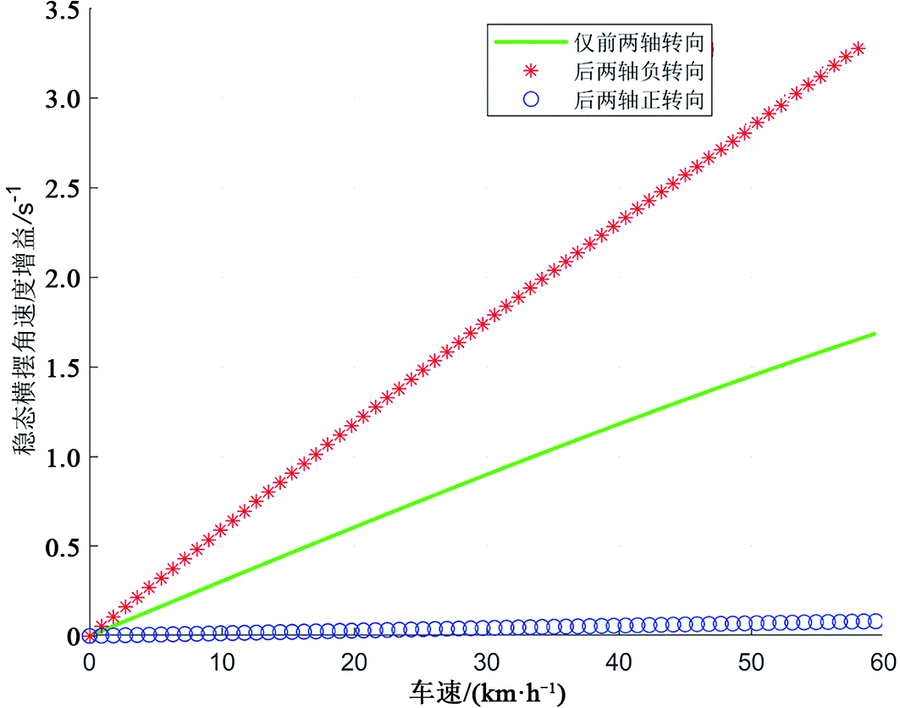
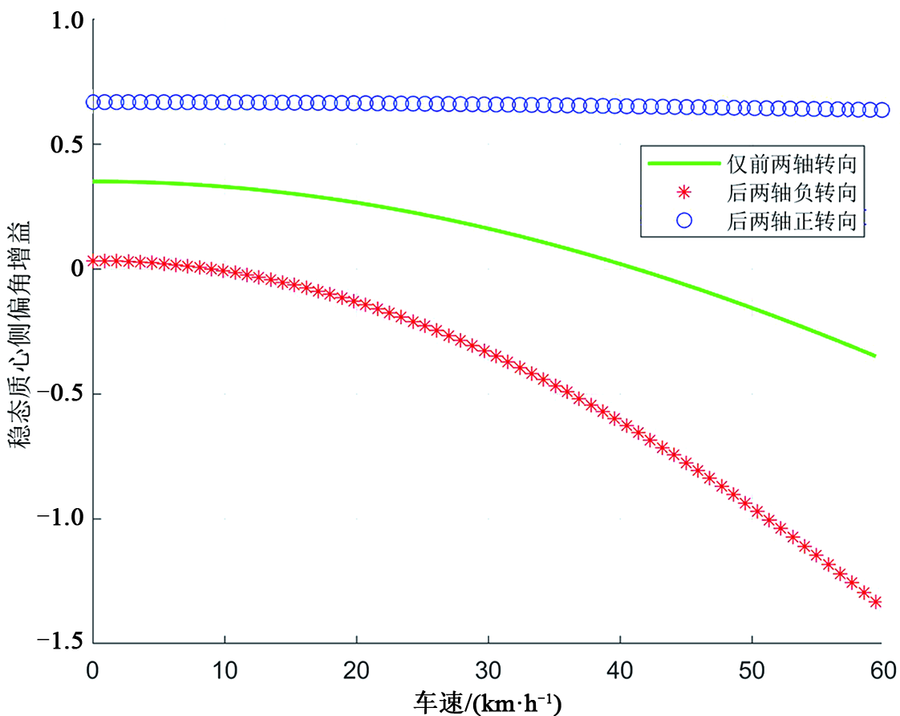
在重型多轴车辆智能化、无人化的发展趋势下,需要开展车辆横向动力学研究。针对某六轴车辆,通过建立多轴车辆线性二自由度转向模型,开展转向特性稳态分析和瞬态分析。仿真结果定性地表明采用多轴转向技术能够有效提升车辆转向机动性,为后续转向控制器设计提供了理论支撑。
中图分类号:

开放获取 本文遵循知识共享-署名-非商业性4.0国际许可协议(CC BY-NC 4.0),允许第三方对本刊发表的论文自由共享(即在任何媒介以任何形式复制、发行原文)、演绎(即修改、转换或以原文为基础进行创作),必须给出适当的署名,提供指向本文许可协议的链接,同时表明是否对原文作了修改,不得将本文用于商业目的。CC BY-NC 4.0许可协议详情请访问 https://creativecommons.org/licenses/by-nc/4.0