山东科学 ›› 2024, Vol. 37 ›› Issue (3): 111-120.doi: 10.3976/j.issn.1002-4026.20230064
昝雨尧1,2( ), 王翔1,*(), 王可馨1, 沈佳燕1
), 王翔1,*(), 王可馨1, 沈佳燕1
ZAN Yuyao1,2(), WANG Xiang1,*(), WANG Kexin1, SHEN Jiayan1
摘要:
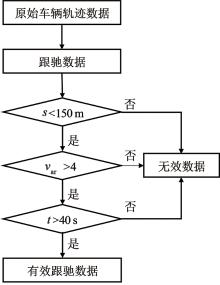
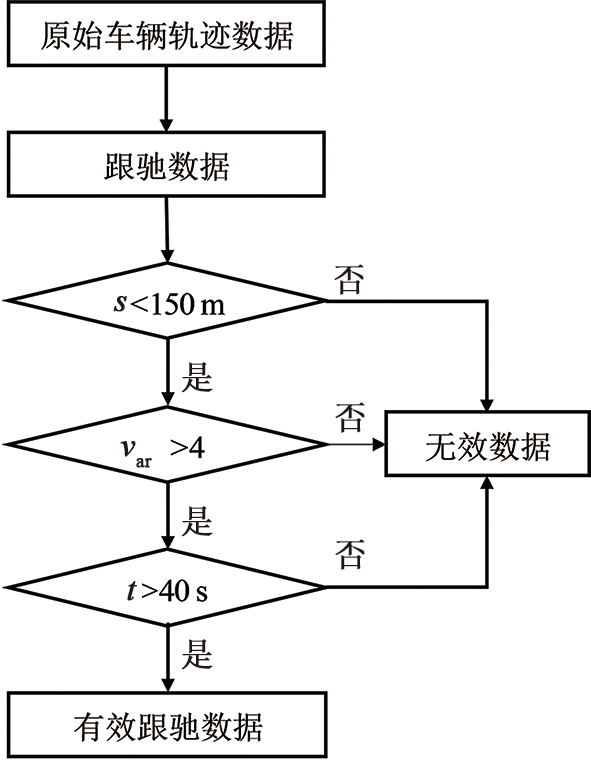
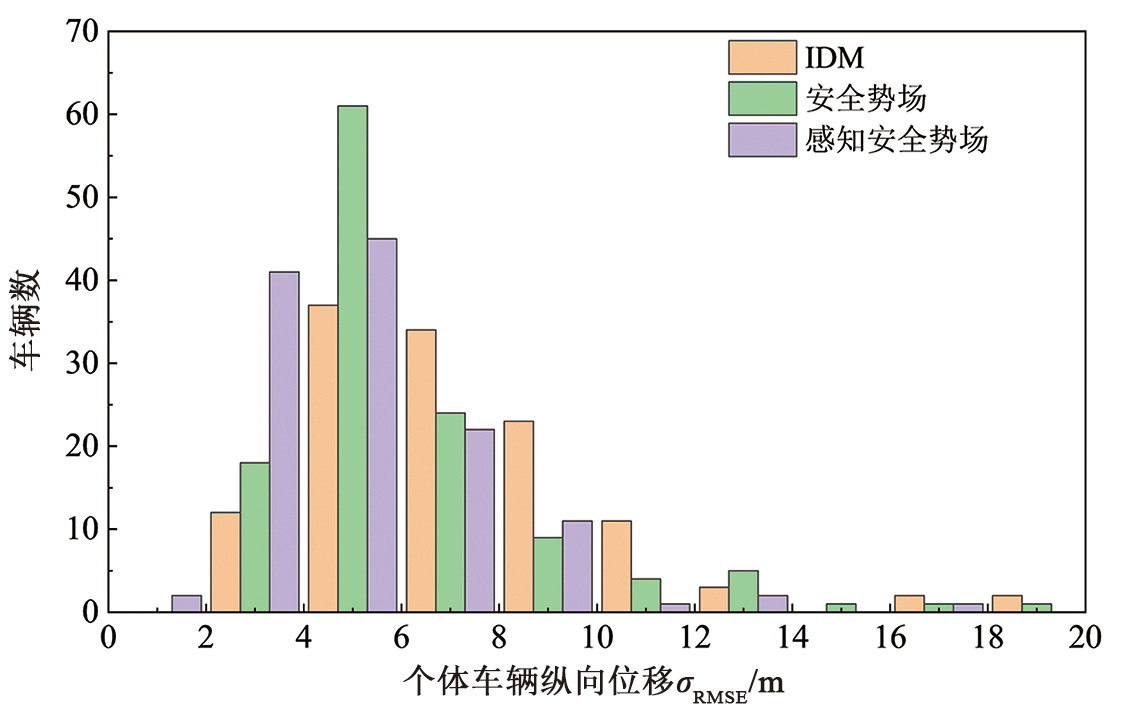
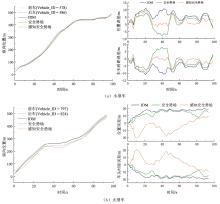
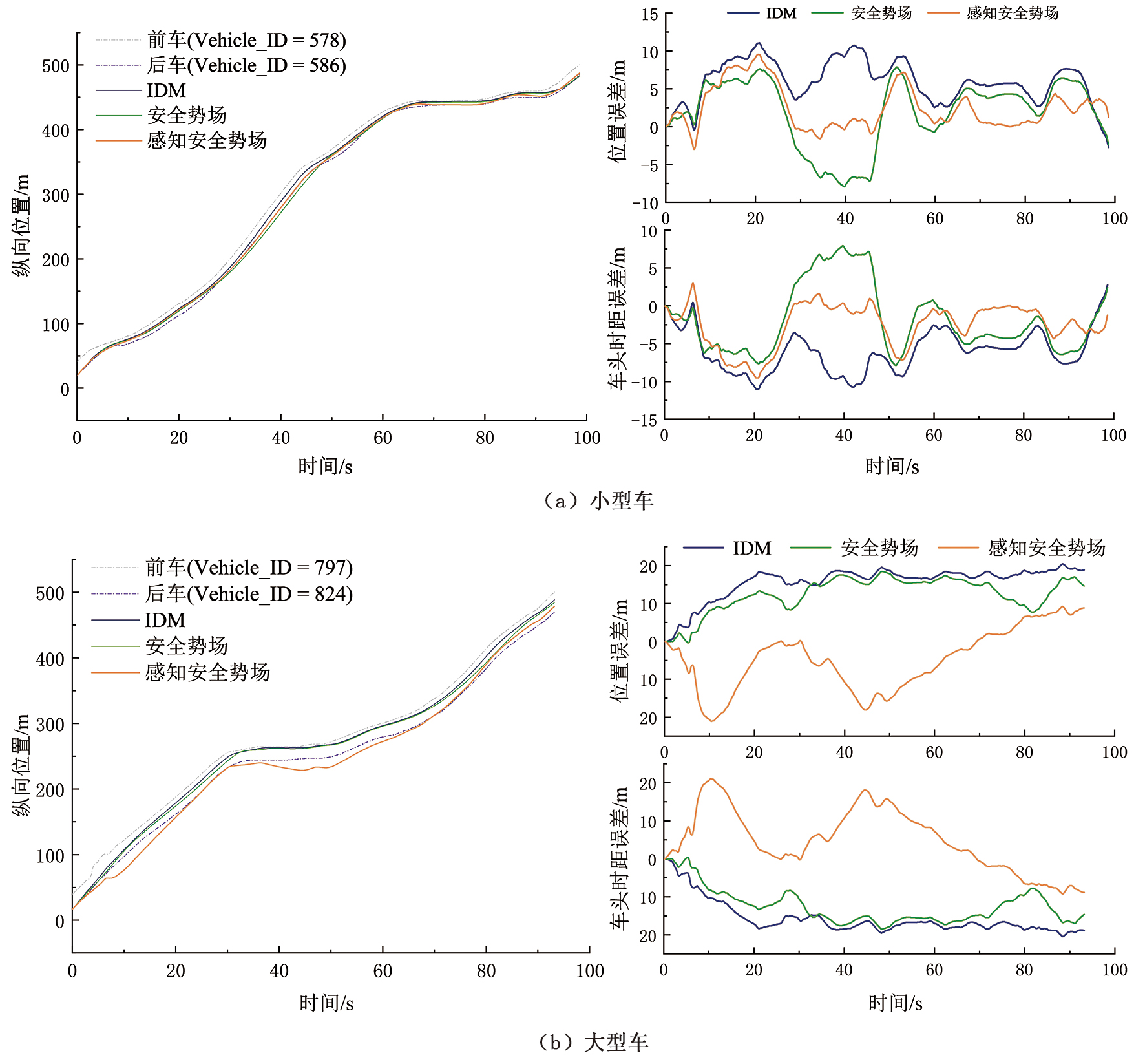
安全势场能够描述车辆驾驶过程中周围安全风险的空间分布。针对既有模型重点关注车辆自身运动状态而忽视驾驶人环境感知信息的问题,围绕车辆安全势场模型改进以及其在跟驰模型中的应用展开研究。引入相对状态影响因子和道路交通状态影响因子对既有模型进行改进,强化车辆间相对速度和所处道路交通状态对行车安全性的影响;利用车型系数对实际空间的距离进行修正,研究多车型混合环境下车型差异对行车安全性的影响;利用感知安全势场将前车运动状态与后车跟驰行为建立联系,得到基于感知安全势场的车辆跟驰模型;采用遗传算法对本文所建模型和智能驾驶人跟驰模型、安全势场跟驰模型进行标定。结果表明,上述3个模型在测试集上的均方根误差分别为6.124、8.515、7.248,证明该模型误差最小,能够更为精确地描述车辆跟驰行为。研究成果能为行车安全风险评估和车辆驾驶行为决策提供理论依据。
中图分类号:

开放获取 本文遵循知识共享-署名-非商业性4.0国际许可协议(CC BY-NC 4.0),允许第三方对本刊发表的论文自由共享(即在任何媒介以任何形式复制、发行原文)、演绎(即修改、转换或以原文为基础进行创作),必须给出适当的署名,提供指向本文许可协议的链接,同时表明是否对原文作了修改,不得将本文用于商业目的。CC BY-NC 4.0许可协议详情请访问 https://creativecommons.org/licenses/by-nc/4.0