山东科学 ›› 2022, Vol. 35 ›› Issue (5): 130-139.doi: 10.3976/j.issn.1002-4026.2022.05.016
刘广亮( ), 马争光, 朱琳, 肖永飞, 张艳芳*()
), 马争光, 朱琳, 肖永飞, 张艳芳*()
LIU Guang-liang(), MA Zheng-guang, ZHU Lin, XIAO Yong-fei, ZHANG Yan-fang*()
摘要:
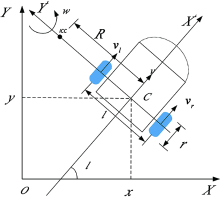
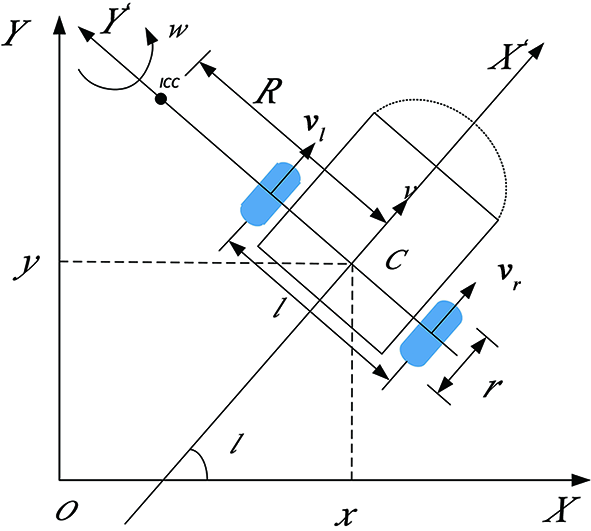
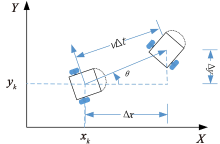
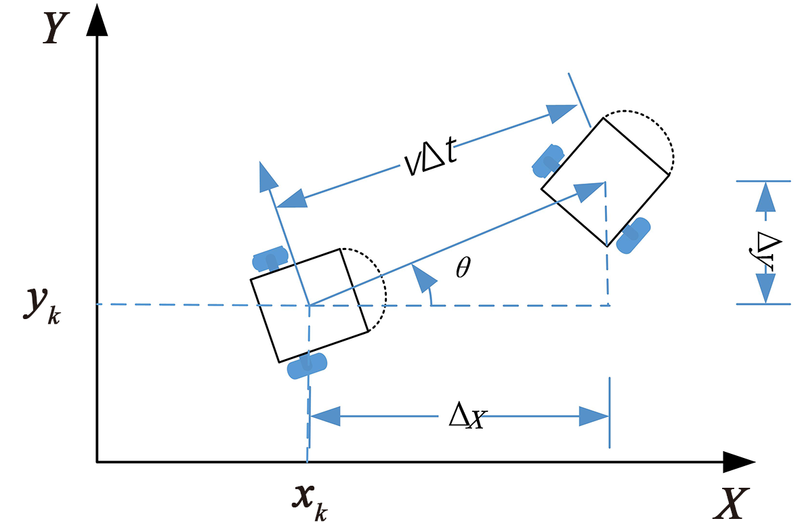
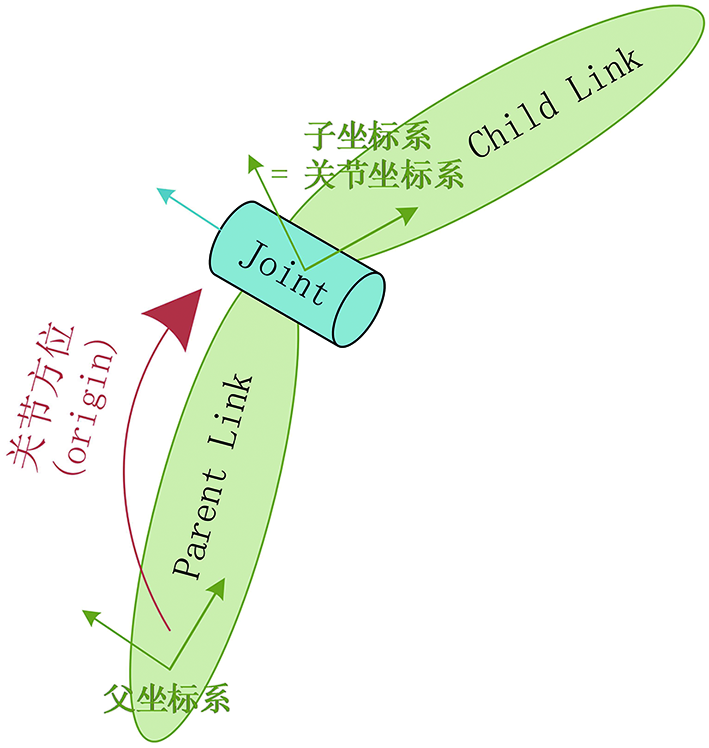
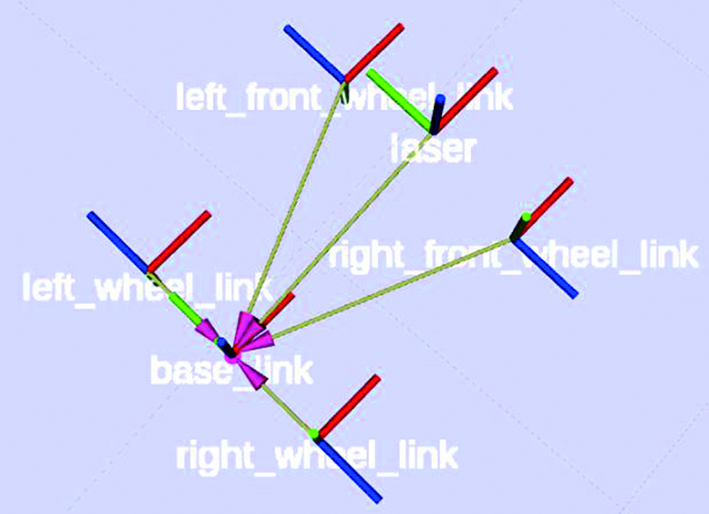
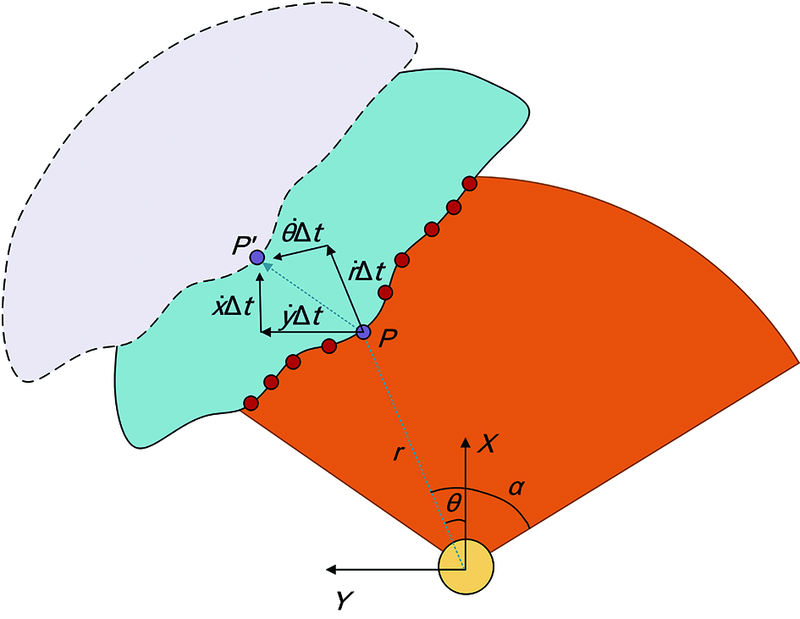
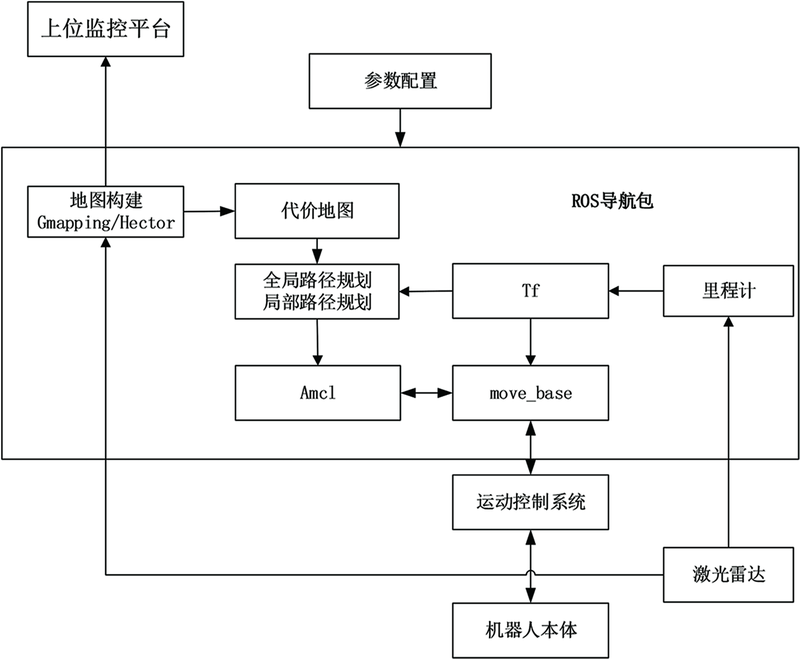
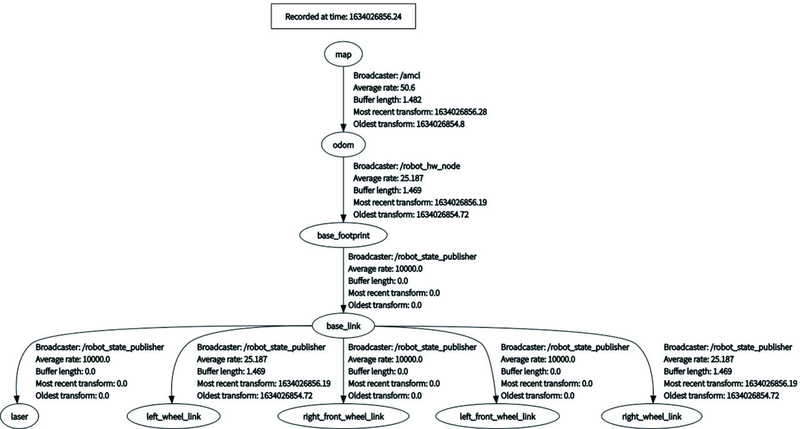
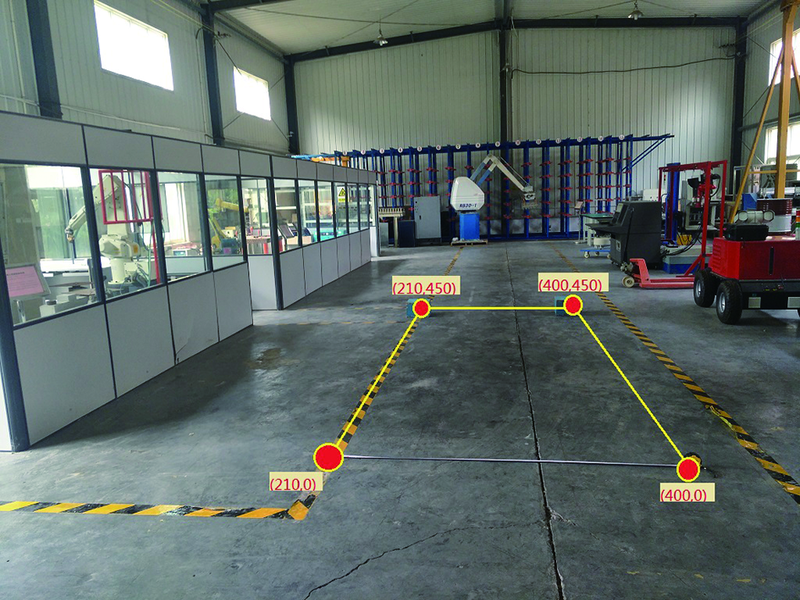
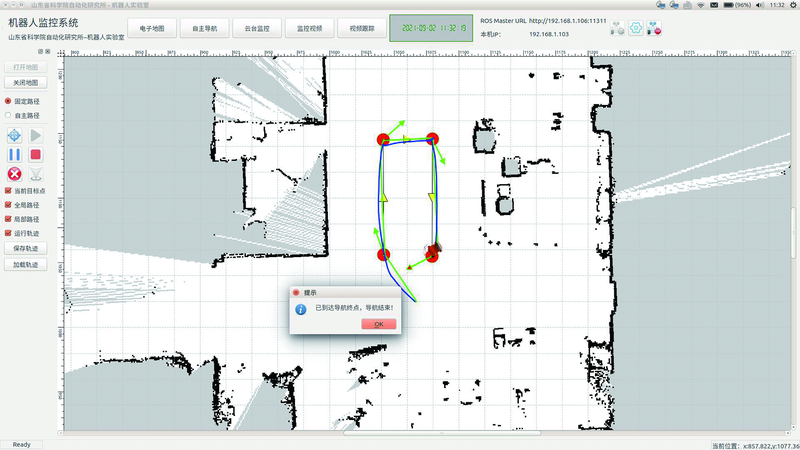
在机器人两轮差速运动模型分析的基础上,根据运动模型的航迹演算公式可实时计算机器人轨迹姿态。基于机器人操作系统架构平台设计了机器人本体、机器人底座、驱动液压马达、导向轮、激光雷达等7个关节和连接的结构模型。各机器人关节坐标系变换关系经过Tf实时发布,用于计算机器人位置坐标信息。针对液压机器人没有配备编码器和视觉系统的不足,系统采用2D平面激光里程计模型(RF2O),通过建立连续激光扫描点对距离的流约束方程获得机器人平面运动估计,进而得出激光雷达的速度和机器人实际运行轨迹。设计了自主导航软件系统,实现了导航地图构建、定点任务导航和多机器人管理等功能,并对机器人定位导航精度进行了测试,分析对比多次指定位置和导航位置的数据差异,结果表明机器人导航定位精度达到设计要求。
中图分类号:

开放获取 本文遵循知识共享-署名-非商业性4.0国际许可协议(CC BY-NC 4.0),允许第三方对本刊发表的论文自由共享(即在任何媒介以任何形式复制、发行原文)、演绎(即修改、转换或以原文为基础进行创作),必须给出适当的署名,提供指向本文许可协议的链接,同时表明是否对原文作了修改,不得将本文用于商业目的。CC BY-NC 4.0许可协议详情请访问 https://creativecommons.org/licenses/by-nc/4.0