山东科学 ›› 2022, Vol. 35 ›› Issue (1): 73-80.doi: 10.3976/j.issn.1002-4026.2022.01.010
李苏琪( ),朱孔金
),朱孔金
LI Su-qi(),ZHU Kong-jin
摘要:
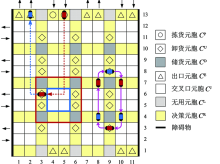
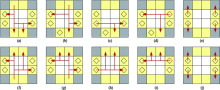
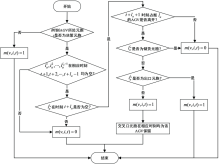
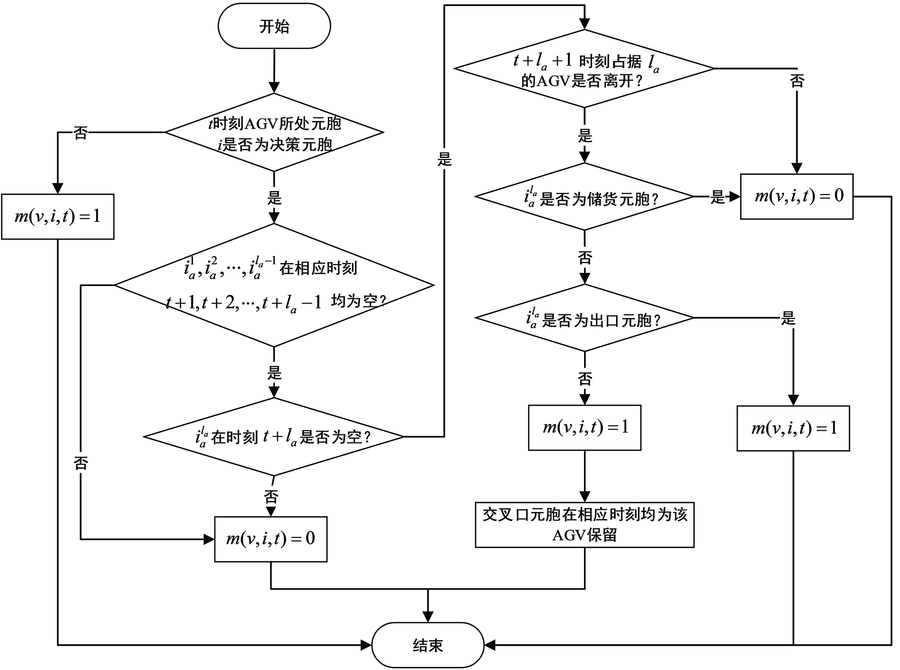
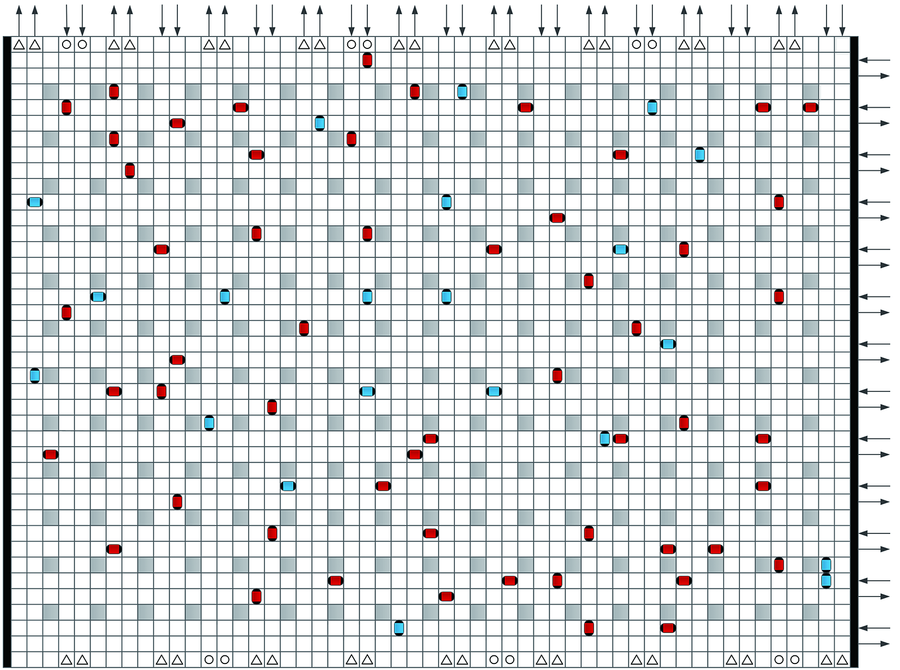
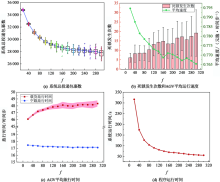
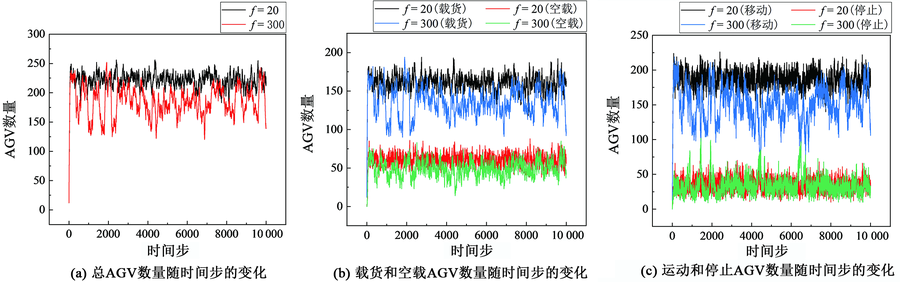
在离散网格环境下设计基于自动导引车辆(automatic guided vehicle, AGV)的物流分拣系统,基于中央控制器的集中控制策略,采用Label Correcting算法对AGV进行动态路径规划,基于交叉口不停留策略对系统内AGV进行交通控制。仿真实验结果表明:所提出的分拣系统能够适用于大规模的物流包裹分拣;路径更新间隔时间对分拣系统运行性能和仿真运行效率具有显著影响,路径更新间隔时间越小,系统运行性能越好,但仿真运行所耗时间越长,在实际应用中越无法保证实时性的要求。因此,在实际应用中确定路径更新间隔时间时,需综合考虑系统运行性能和仿真运行效率两方面指标。
中图分类号:

开放获取 本文遵循知识共享-署名-非商业性4.0国际许可协议(CC BY-NC 4.0),允许第三方对本刊发表的论文自由共享(即在任何媒介以任何形式复制、发行原文)、演绎(即修改、转换或以原文为基础进行创作),必须给出适当的署名,提供指向本文许可协议的链接,同时表明是否对原文作了修改,不得将本文用于商业目的。CC BY-NC 4.0许可协议详情请访问 https://creativecommons.org/licenses/by-nc/4.0