山东科学 ›› 2025, Vol. 38 ›› Issue (3): 132-138.doi: 10.3976/j.issn.1002-4026.2025042
• 海洋信息 • 上一篇
王兴民1( ), 刘瑞雪1, 李倩1, 张伟忠1,*(), 董巍2
), 刘瑞雪1, 李倩1, 张伟忠1,*(), 董巍2
WANG Xingmin1(), LIU Ruixue1, LI Qian1, ZHANG Weizhong1,*(), DONG Wei2
摘要:
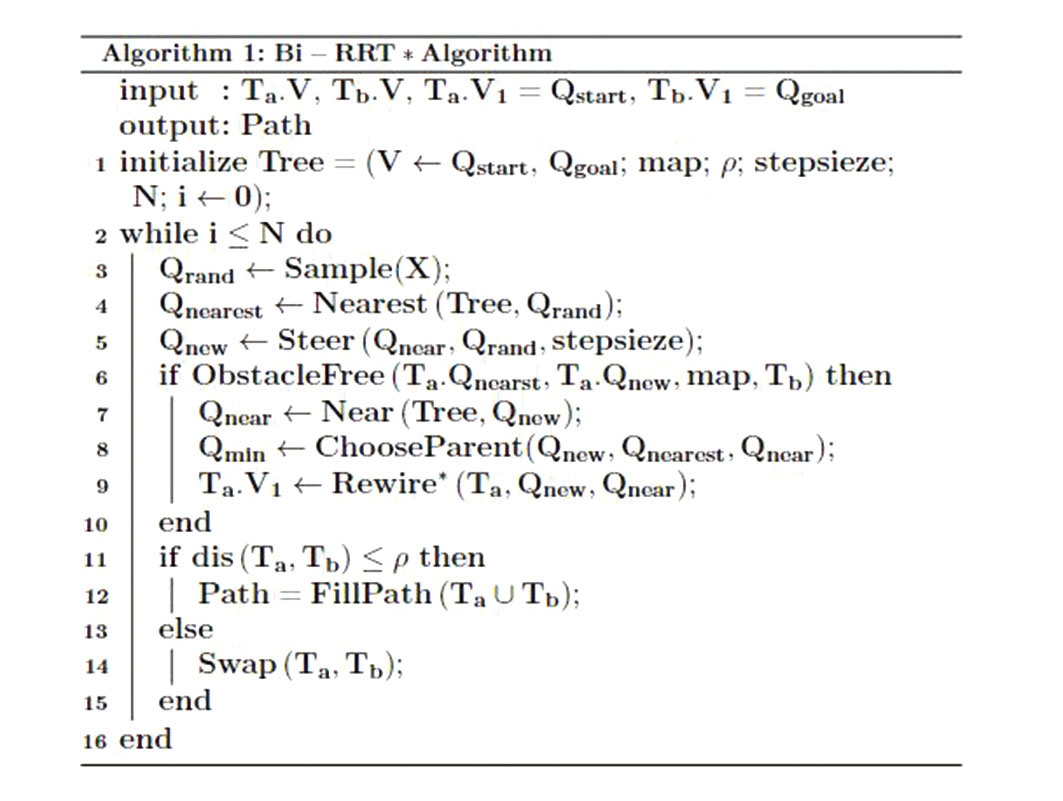
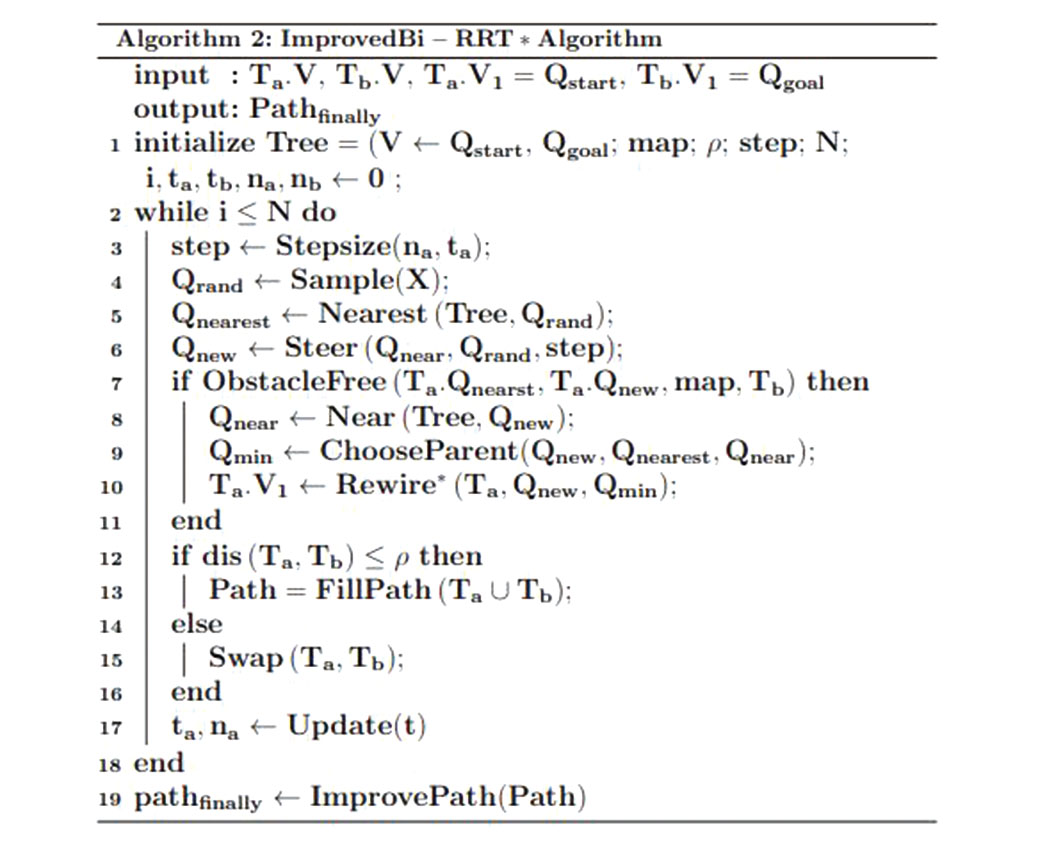
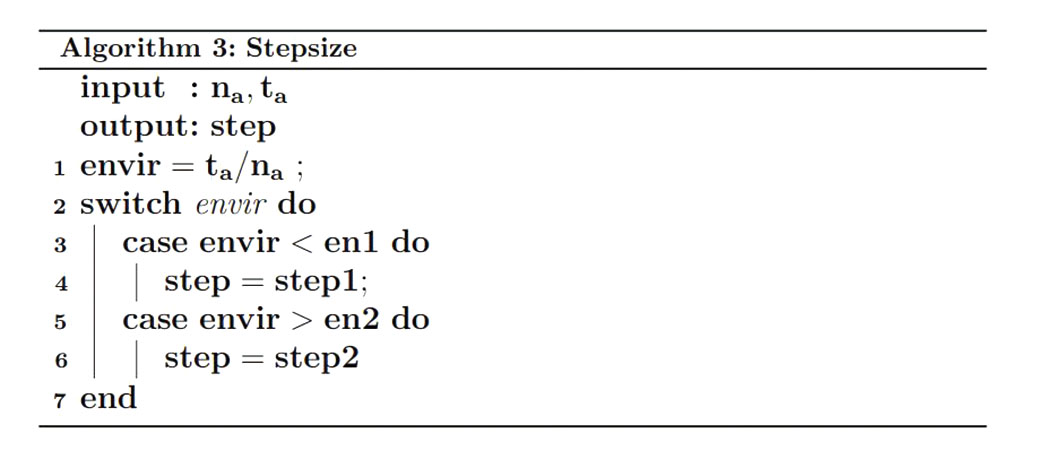
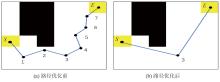
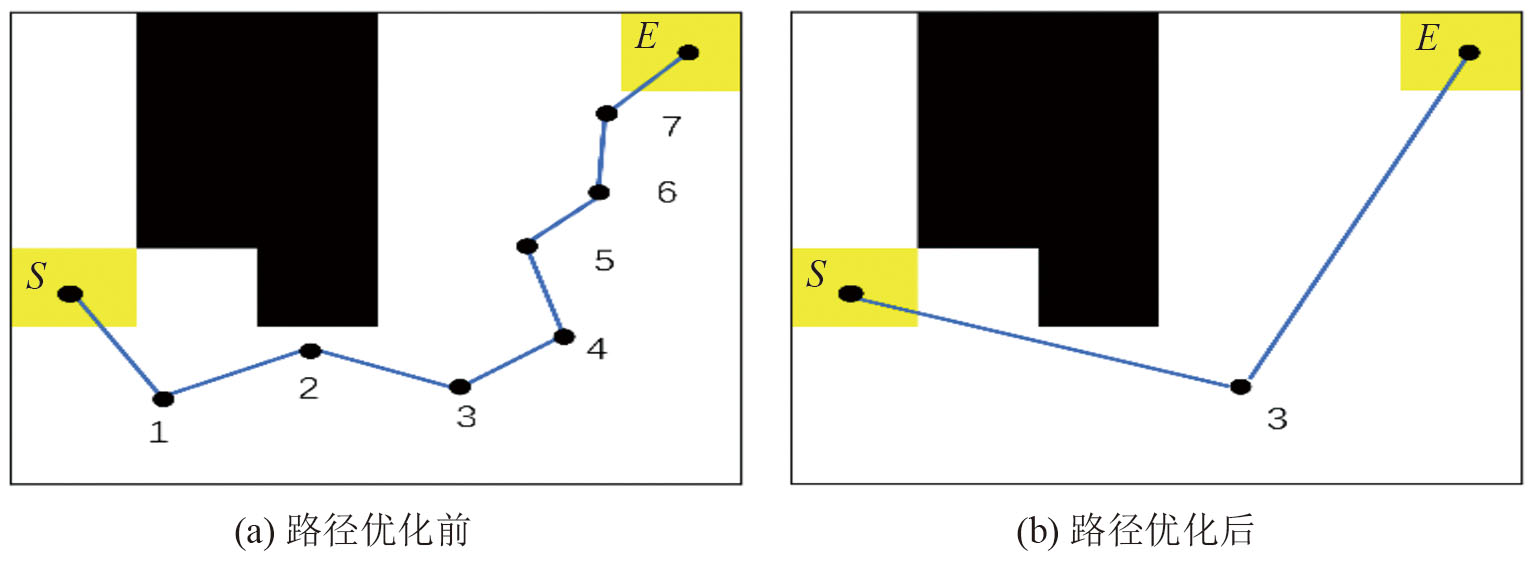
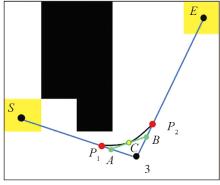
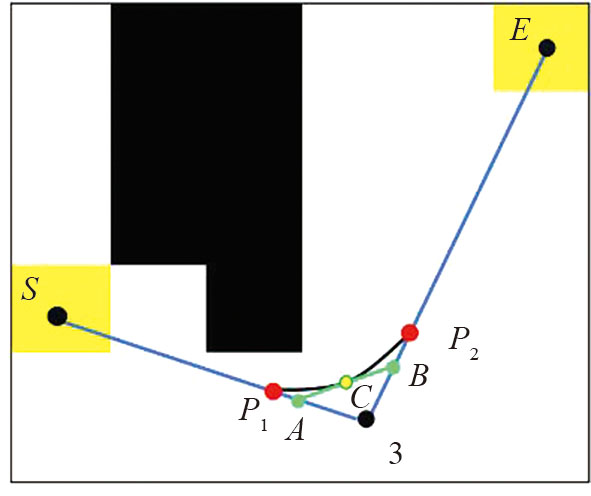
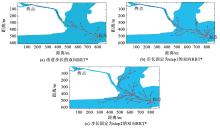
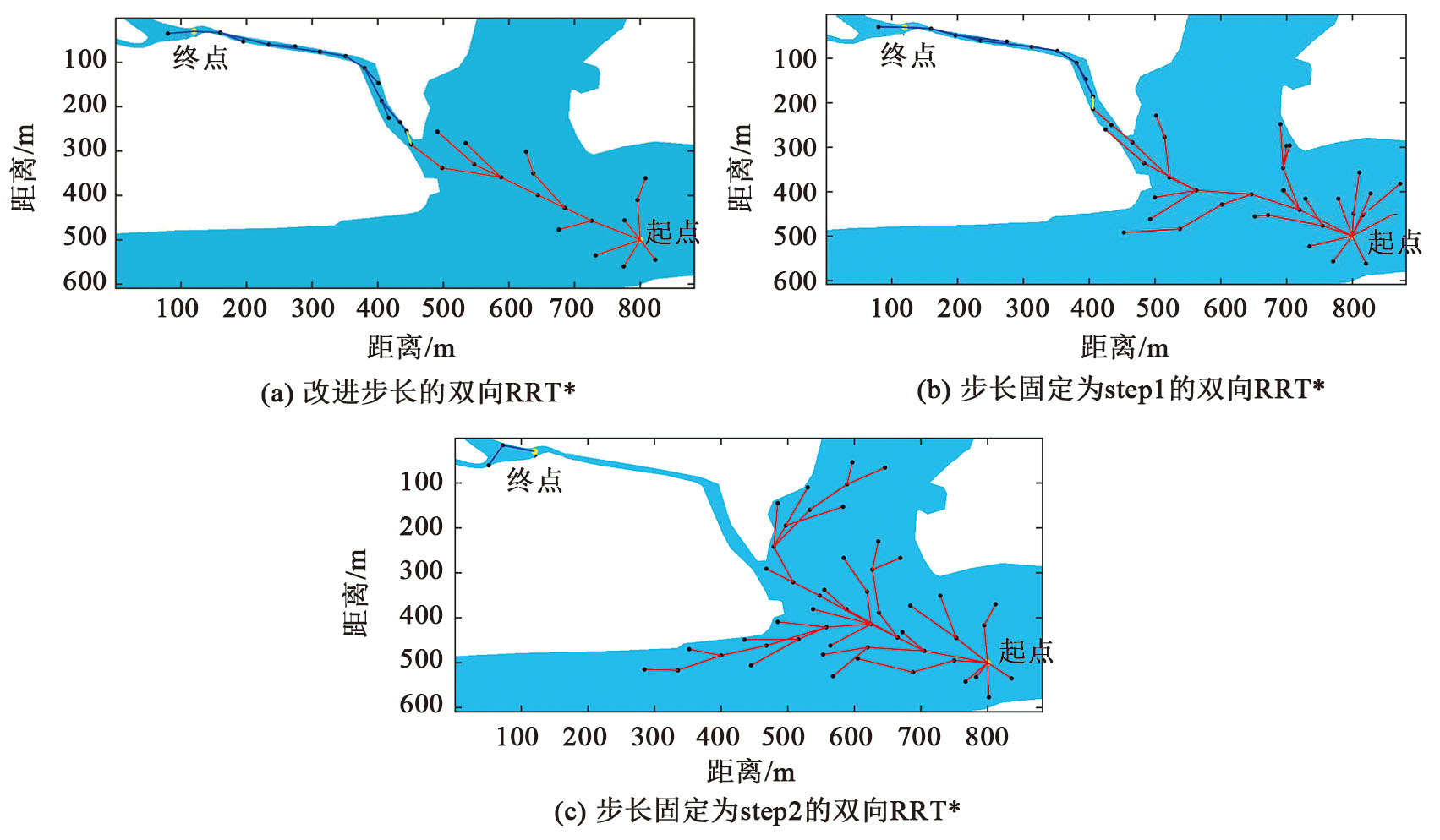
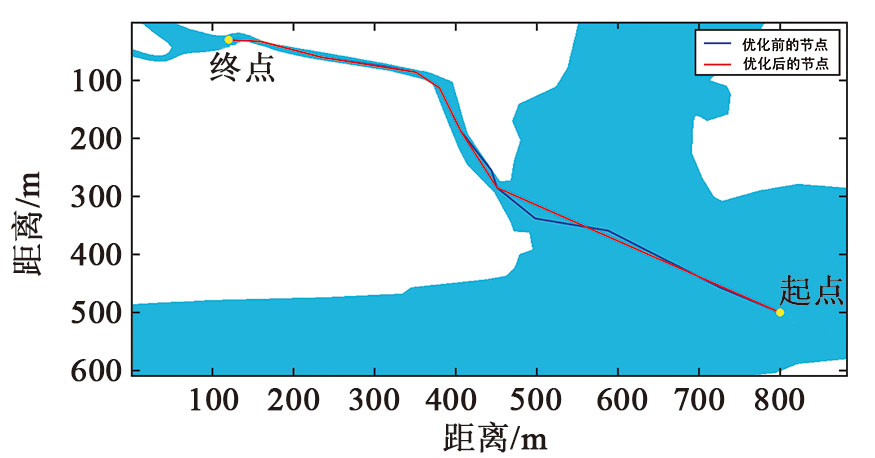
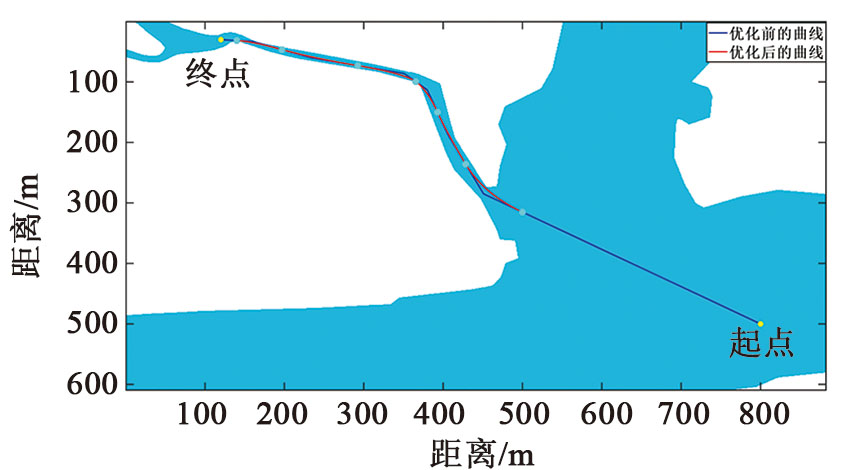
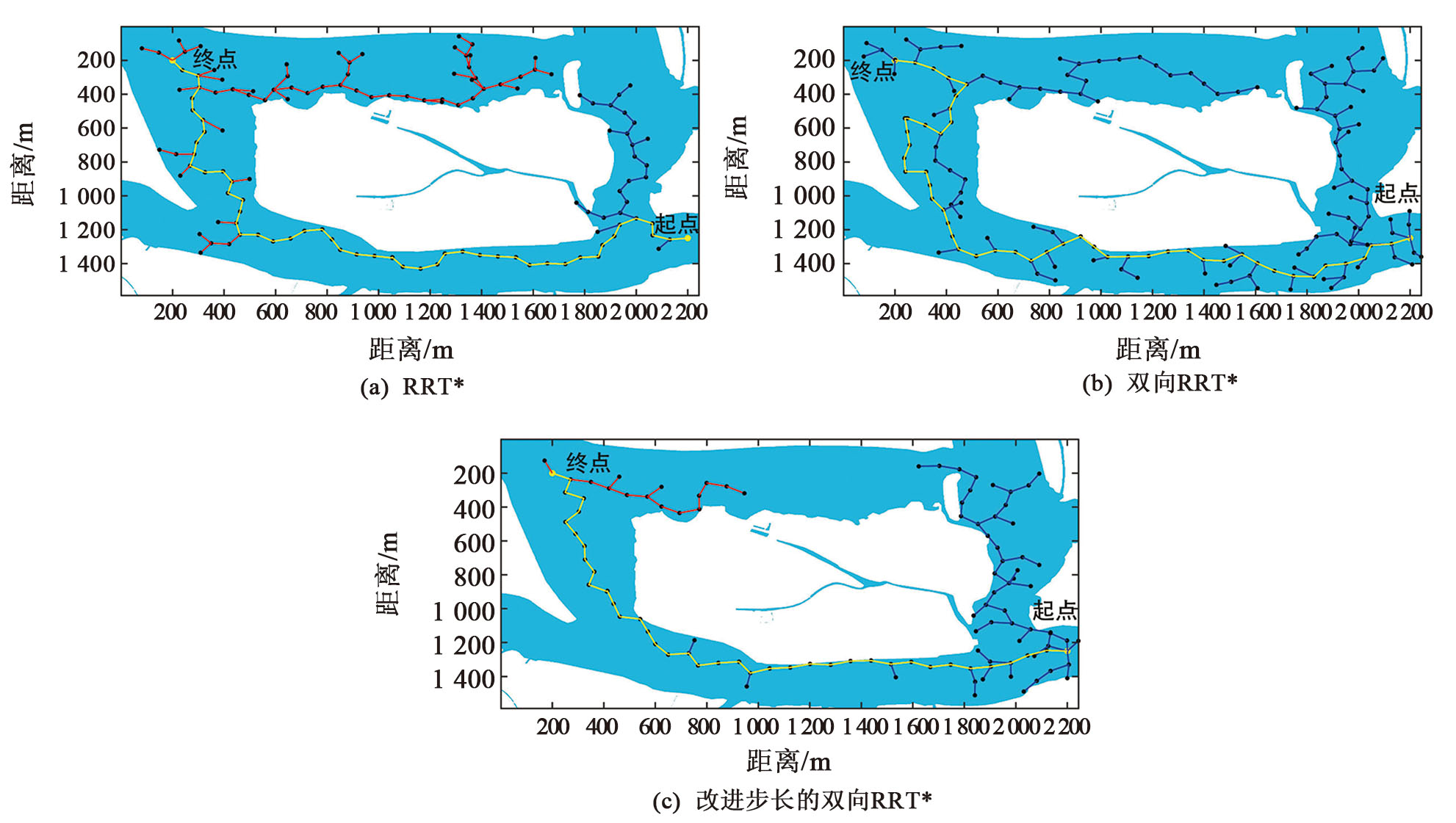
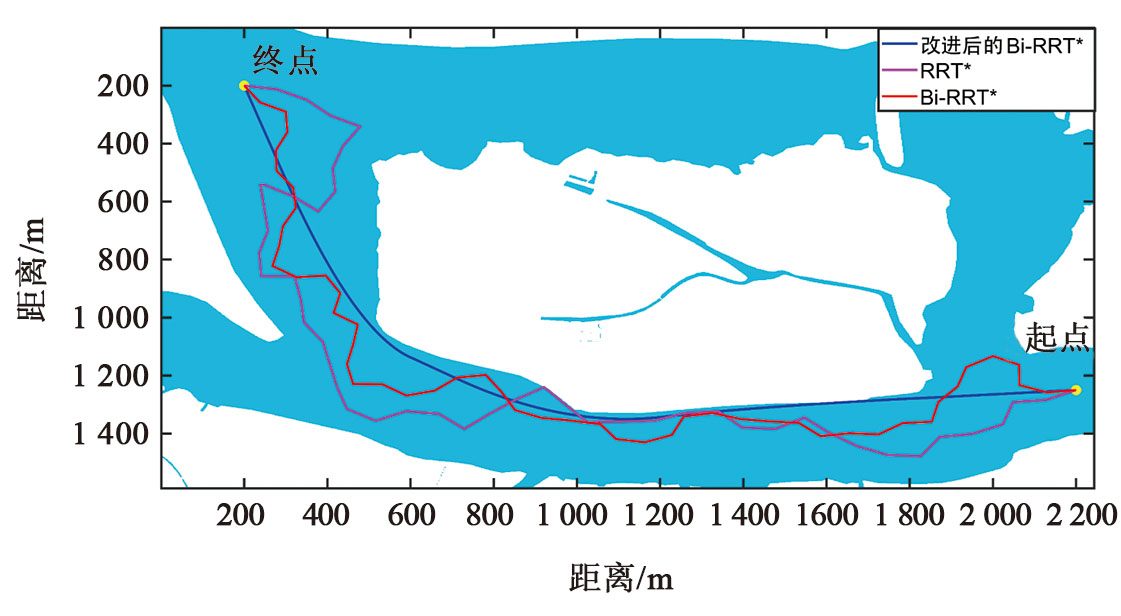
无人船是一种新型的无人多功能海洋监测平台,路径规划作为其核心技术,在其运行中发挥着至关重要的作用。随着海上交通密度持续增长和航行安全标准升级,传统的路径规划方法在复杂环境适应性不足问题愈发严重。该研究针对双向RRT*算法在无人船路径规划中的局限性,提出多维度改进方案,建立基于环境特征感知的自适应步长调节机制,设计了关键节点筛选策略,最后使用贝塞尔曲线对产生的路径进行平滑处理,生成更加符合无人船运动学要求的平滑曲线。仿真结果表明,改进后的双向RRT*算法相比传统双向RRT*算法具有更高的节点生成效率,更优的整体性能和更平滑的路径。
中图分类号:

开放获取 本文遵循知识共享-署名-非商业性4.0国际许可协议(CC BY-NC 4.0),允许第三方对本刊发表的论文自由共享(即在任何媒介以任何形式复制、发行原文)、演绎(即修改、转换或以原文为基础进行创作),必须给出适当的署名,提供指向本文许可协议的链接,同时表明是否对原文作了修改,不得将本文用于商业目的。CC BY-NC 4.0许可协议详情请访问 https://creativecommons.org/licenses/by-nc/4.0