山东科学 ›› 2026, Vol. 39 ›› Issue (3): 33-42.doi: 10.3976/j.issn.1002-4026.2025062
李冰a( ), 蒋瑞b
), 蒋瑞b
LI Binga(), JIANG Ruib
摘要:
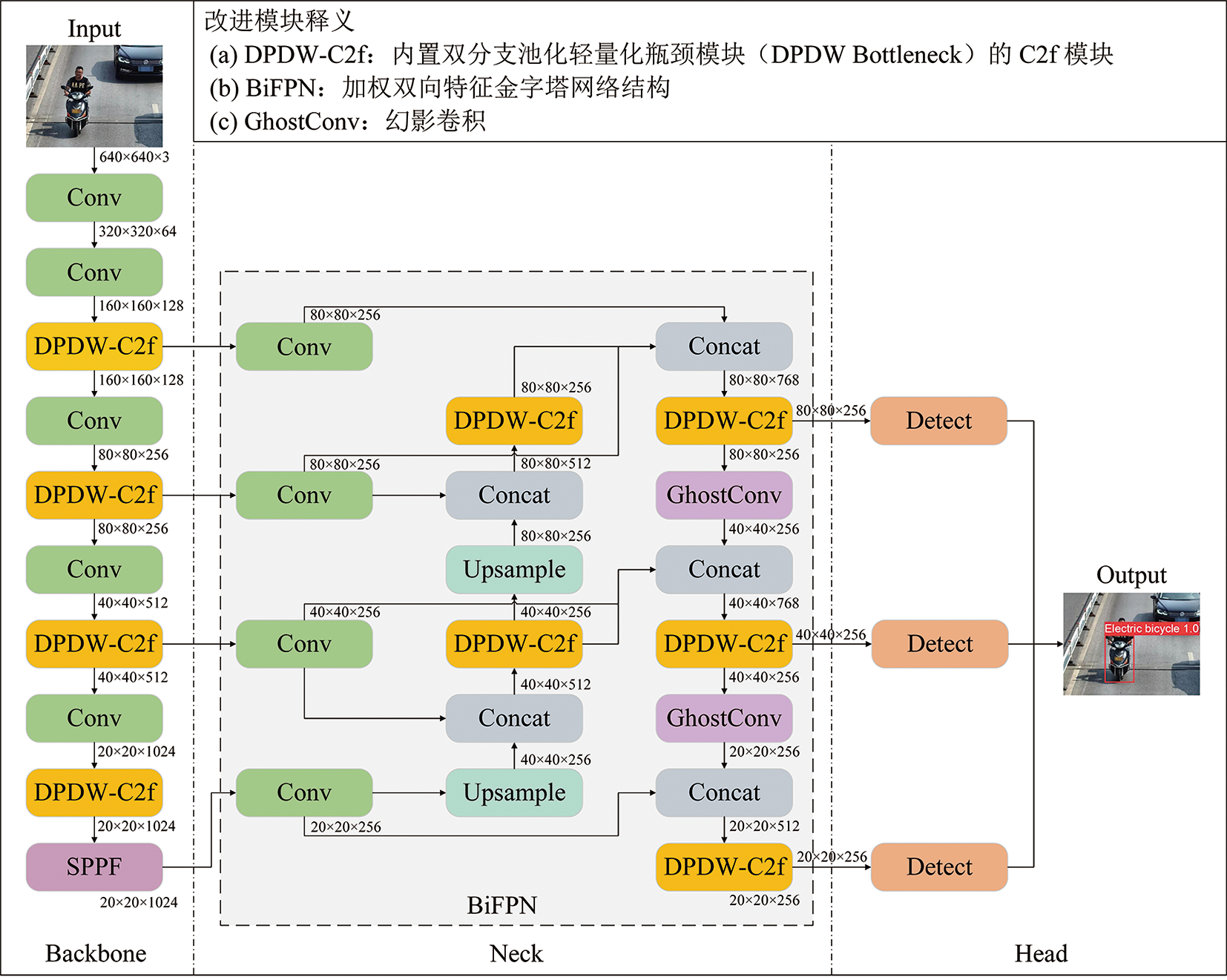
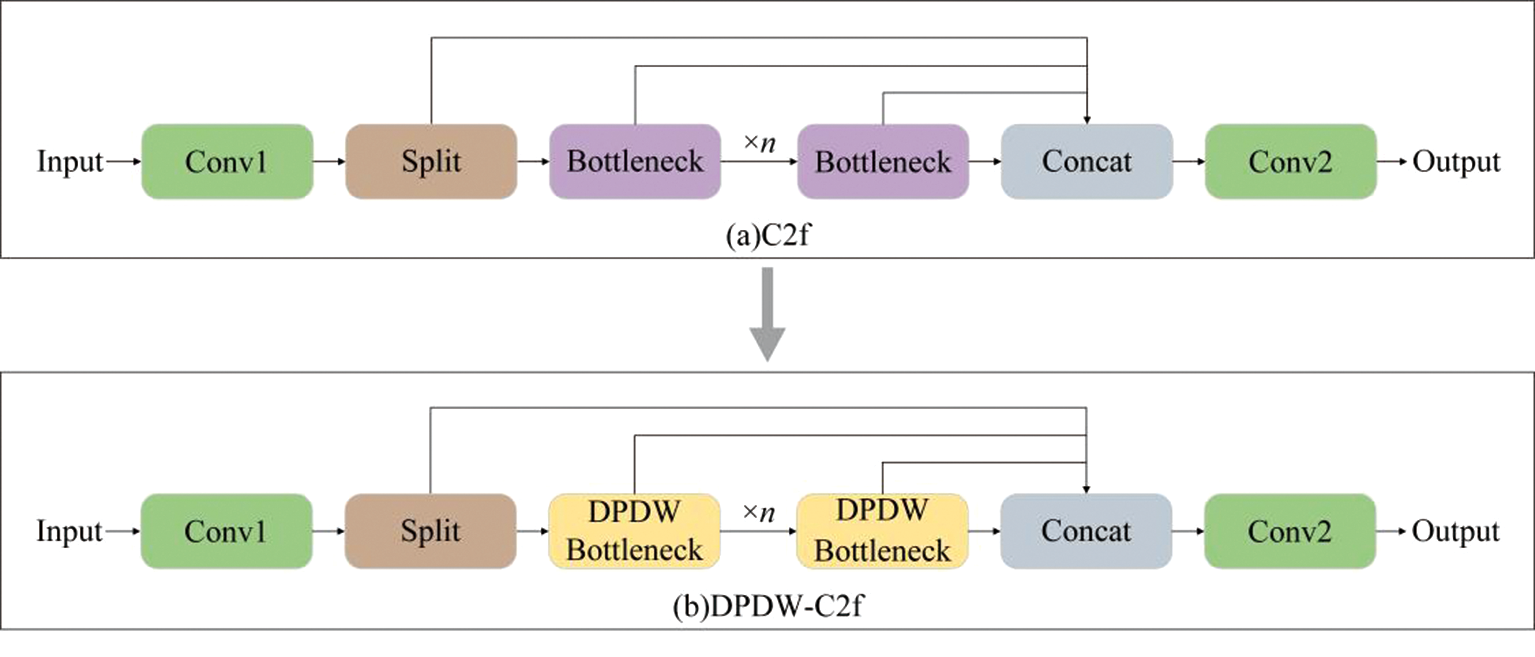
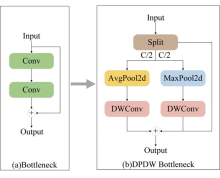
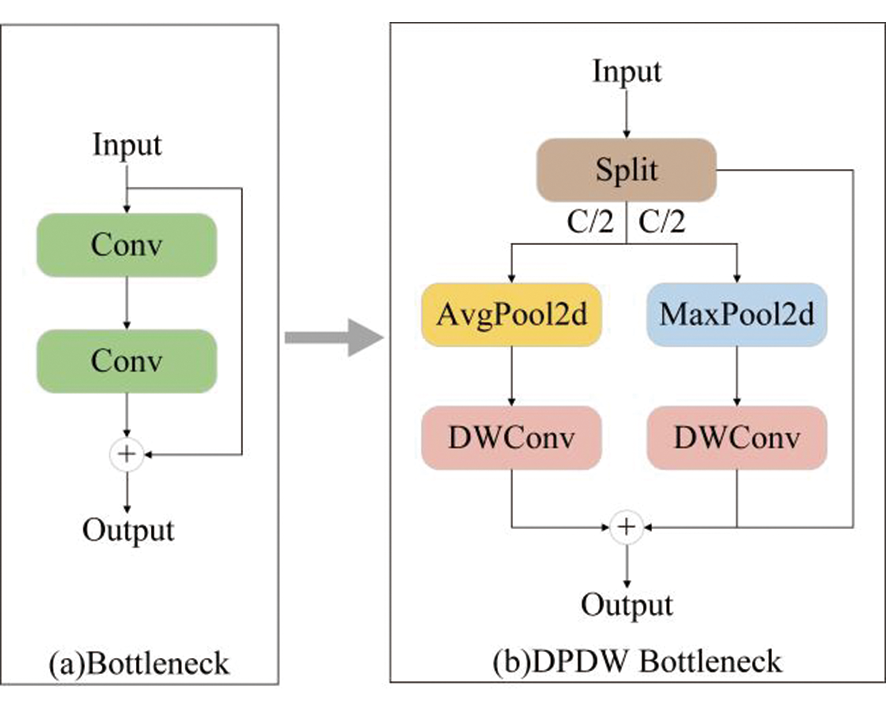
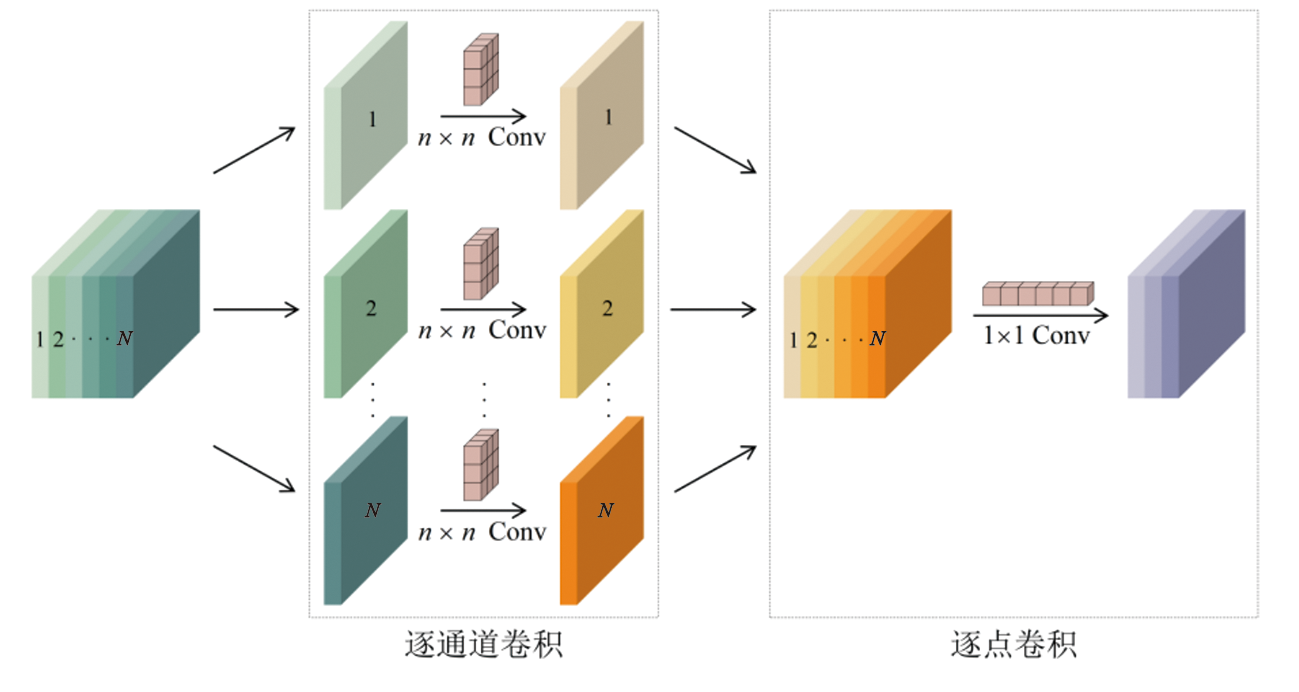
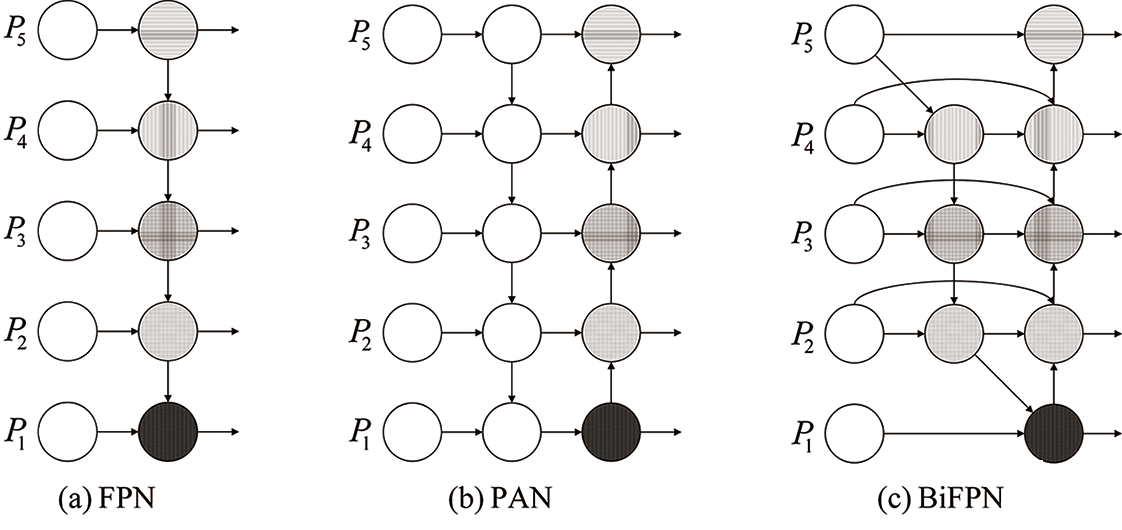
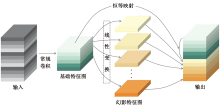
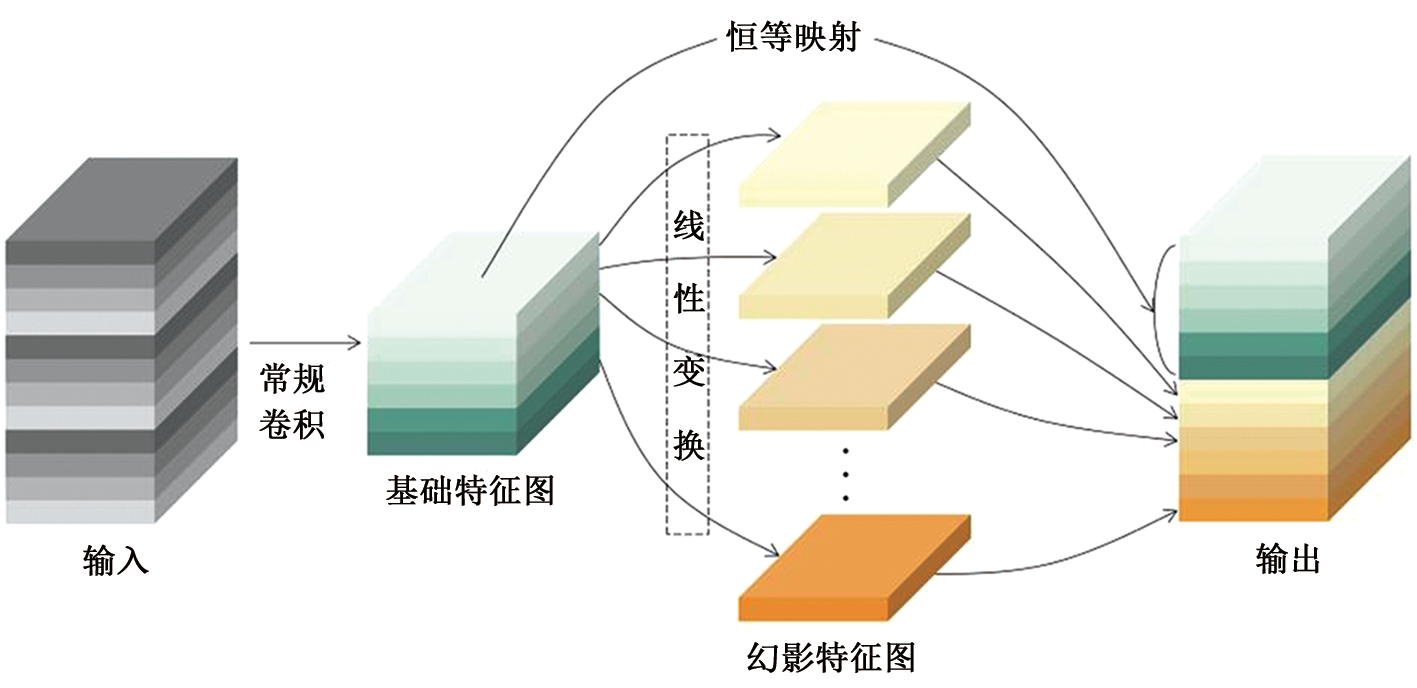
针对当前两轮自行车检测模型面临目标尺度变化显著、环境干扰因素多、实时性要求高及检测精度与计算成本难以良好平衡的挑战,提出一种基于计算机视觉的轻量高效两轮自行车检测模型YOLO-DBG。首先,设计了全新的双分支池化轻量化瓶颈模块,通过差异化特征聚合策略同步提取两轮自行车的全局轮廓与局部细节特征,提升多尺度特征提取能力,并通过集成深度可分离卷积降低模型计算成本;其次,在颈部网络引入加权双向特征金字塔网络(bidirectional feature pyramid network, BiFPN)结构,利用双向跨尺度连接和动态加权机制强化对车辆关键部位的特征融合,并通过节点剪枝有效降低计算成本;此外,采用幻影卷积作为下采样算子,在维持特征表达能力的同时显著压缩模型。三者协同构建了有效的轻量化网络结构。实验结果表明,改进后模型的平均精度均值较原模型提升0.2%,参数量、计算量和模型大小分别减少55.8%、37.0%和53.1%。该方法在保障高检测精度的前提下,实现了理想的轻量化效果,为两轮自行车实时检测提供了新的解决方案。
中图分类号:

开放获取 本文遵循知识共享-署名-非商业性4.0国际许可协议(CC BY-NC 4.0),允许第三方对本刊发表的论文自由共享(即在任何媒介以任何形式复制、发行原文)、演绎(即修改、转换或以原文为基础进行创作),必须给出适当的署名,提供指向本文许可协议的链接,同时表明是否对原文作了修改,不得将本文用于商业目的。CC BY-NC 4.0许可协议详情请访问 https://creativecommons.org/licenses/by-nc/4.0