| [1] |
WAYKOLE S, SHIWAKOTI N, STASINOPOULOS P. Review on lane detection and tracking algorithms of advanced driver assistance system[J]. Sustainability, 2021, 13(20): 11417. DOI: 10.3390/su132011417.
|
| [2] |
刘富强, 张姗姗, 朱文红, 等. 一种基于视觉的车道线检测与跟踪算法[J]. 同济大学学报(自然科学版), 2010, 38(2): 223-229. DOI: 10.3969/j.issn.0253-374x.2010.02.013.
|
| [3] |
胡彬, 赵春霞. 基于概率霍夫变换的快速车道线检测方法[J]. 微电子学与计算机, 2011, 28(10): 177-180. DOI: 10.19304/j.cnki.issn1000-7180.2011.10.046.
|
| [4] |
ZÜRN J, VERTENS J, BURGARD W. Lane graph estimation for scene understanding in urban driving[J]. IEEE Robotics and Automation Letters, 2021, 6(4): 8615-8622. DOI: 10.1109/LRA.2021.3111433
|
| [5] |
何旭光, 江磊, 罗一平, 等. 基于Hough变换的车道线检测算法设计[J]. 农业装备与车辆工程, 2019, 57(11): 90-91. DOI: 10.3969/j.issn.1673-3142.2019.11.022.
|
| [6] |
TIAN J, LIU S W, ZHONG X Y, et al. LSD-based adaptive lane detection and tracking for ADAS in structured road environment[J]. Soft Computing, 2021, 25(7): 5709-5722. DOI: 10.1007/s00500-020-05566-4.
|
| [7] |
PIZZATI F, GARCIA F. Enhanced free space detection in multiple lanes based on single CNN with scene identification[C]// 2019 IEEE Intelligent Vehicles Symposium (IV). Paris: IEEE, 2019: 2536-2541. DOI: 10.1109/ivs.2019.8814181.
|
| [8] |
PAN X G, SHI J P, LUO P, et al. Spatial as deep: Spatial CNN for traffic scene understanding[J]. Proceedings of the AAAI Conference on Artificial Intelligence, 2018, 32(1).DOI: 10.1609/aaai.v32i1.12301.
|
| [9] |
CHEN Q, WANG Z, LONG B, et al. Three branch net lane detection on complex road conditions[C]// 2019 IEEE International Conference on Systems, Man and Cybernetics (SMC). IEEE, 2019: 3480-3485. DOI: 10.1109/SMC.2019.8913940.
|
| [10] |
NEVEN D, DE BRABANDERE B, GEORGOULIS S, et al. Towards end-to-end lane detection: An instance segmentation approach[C]// 2018 IEEE Intelligent Vehicles Symposium (IV). Changshu: IEEE, 2018: 286-291. DOI: 10.1109/ivs.2018.8500547.
|
| [11] |
HOU Y N, MA Z, LIU C X, et al. Learning lightweight lane detection CNNs by self attention distillation[C]// 2019 IEEE/CVF International Conference on Computer Vision (ICCV). Seoul: IEEE, 2019: 1013-1021. DOI: 10.1109/iccv.2019.00110.
|
| [12] |
刘彬, 刘宏哲. 基于改进Enet网络的车道线检测算法[J]. 计算机科学, 2020, 47(4): 142-149. DOI: 10.11896/jsjkx.190500021.
|
| [13] |
KIM J, LEE M. Robust lane detection based on convolutional neural network and random sample consensus[M]// Neural Information Processing. Cham: Springer International Publishing, 2014: 454-461. DOI: 10.1007/978-3-319-12637-1_57.
|
| [14] |
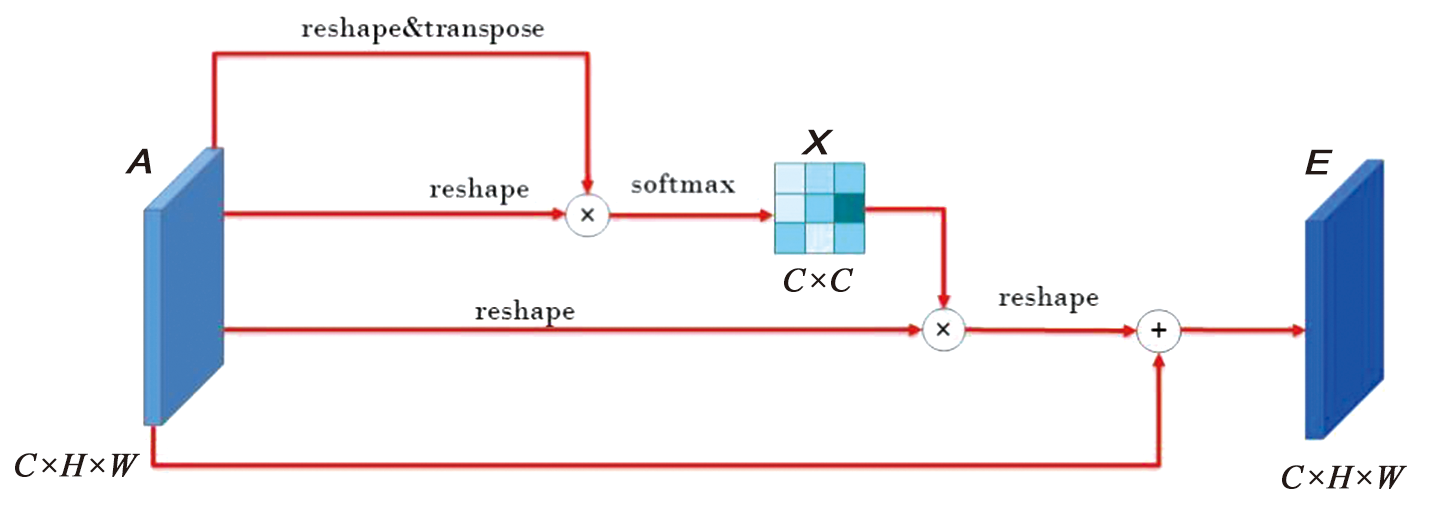
FU J, LIU J, TIAN H J, et al. Dual attention network for scene segmentation[C]// 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Long Beach, CA, USA. IEEE, 2019: 3141-3149. DOI: 10.1109/cvpr.2019.00326.
|
| [15] |
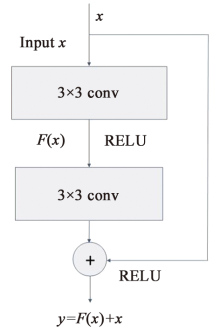
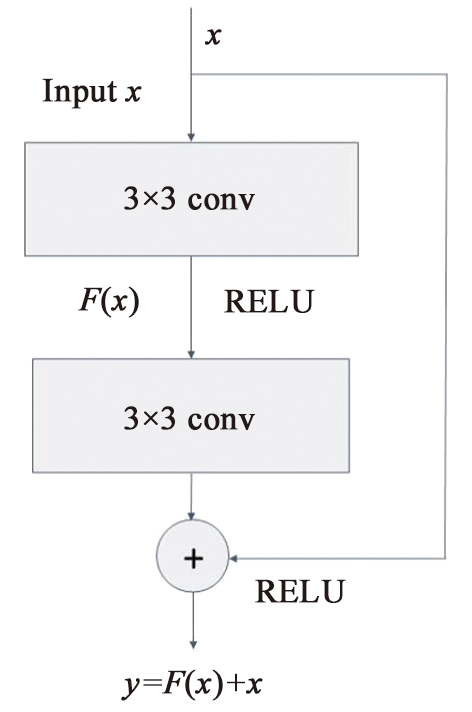
HE K M, ZHANG X Y, REN S Q, et al. Deep residual learning for image recognition[C]// 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Las Vegas, NV, USA. IEEE, 2016: 770-778. DOI: 10.1109/cvpr.2016.90.
|
| [16] |
CHEN Z P, LIU Q F, LIAN C F. PointLaneNet: Efficient end-to-end CNNs for Accurate Real-Time Lane Detection[C]// 2019 IEEE Intelligent Vehicles Symposium (IV). Paris, France. IEEE, 2019: 2563-2568. DOI: 10.1109/ivs.2019.8813778.
|
| [17] |
CHEN L C, PAPANDREOU G, KOKKINOS I, et al. DeepLab: Semantic image segmentation with deep convolutional nets, atrous convolution, and fully connected CRFs[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2018, 40(4): 834-848. DOI: 10.1109/TPAMI.2017.2699184.
|
 ), 李星禹(
), 李星禹(