山东科学 ›› 2024, Vol. 37 ›› Issue (2): 65-73.doi: 10.3976/j.issn.1002-4026.20230133
高秋玲1( ), 成巍1, 李文龙1, 戈海龙1, 侯兴强1, 宋汝晖1, 魏佳洁1, 贾天烁1, 蔡馨燕2,*()
), 成巍1, 李文龙1, 戈海龙1, 侯兴强1, 宋汝晖1, 魏佳洁1, 贾天烁1, 蔡馨燕2,*()
GAO Qiuling1(), CHENG Wei1, LI Wenlong1, GE Hailong1, HOU Xingqiang1, SONG Ruhui1, WEI Jiajie1, JIA Tianshuo1, CAI Xinyan2,*()
摘要:
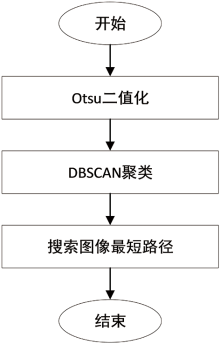
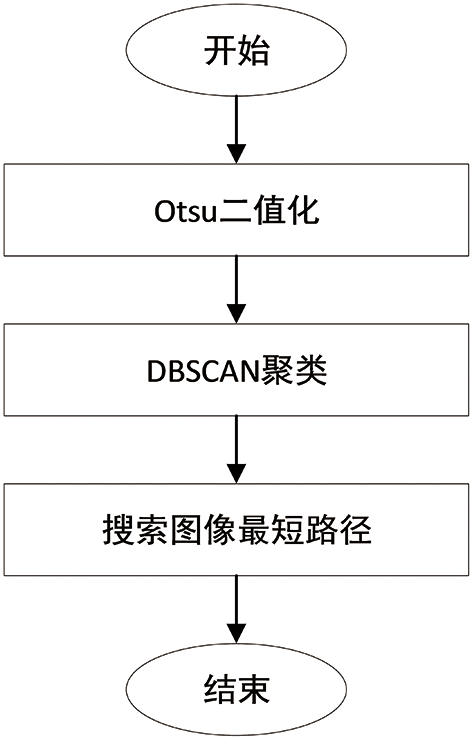
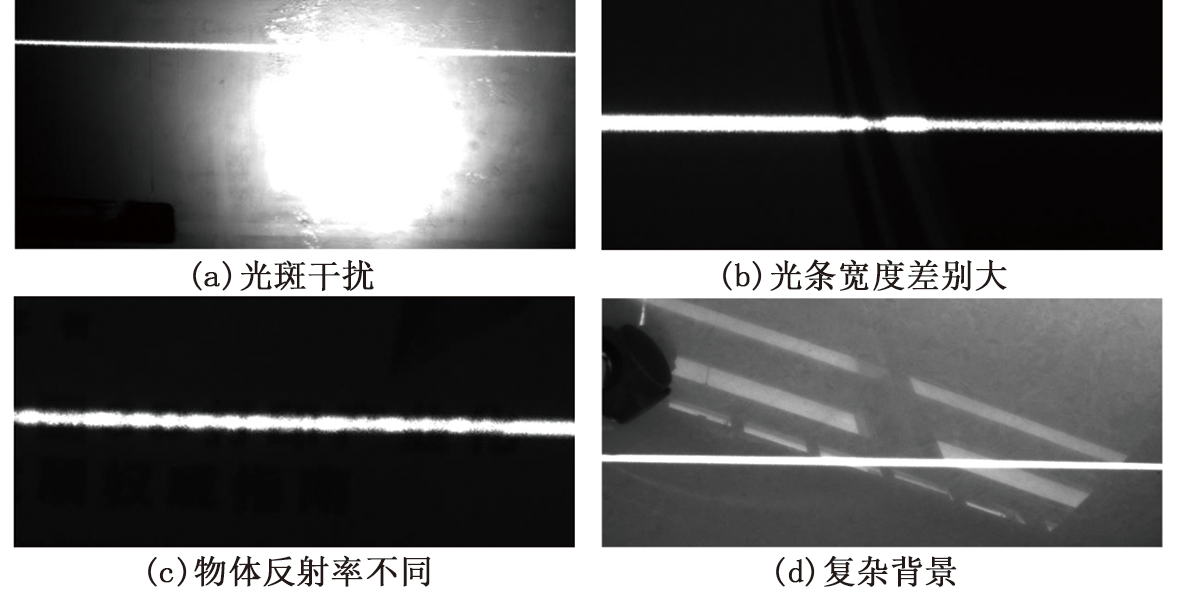
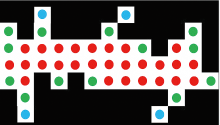
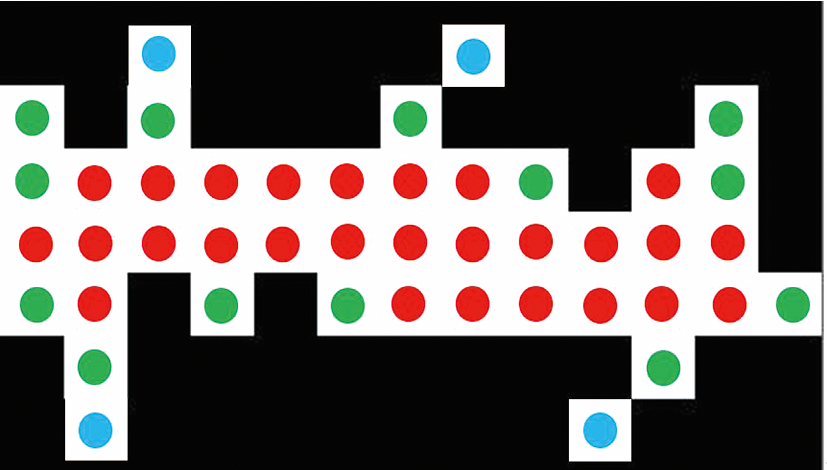
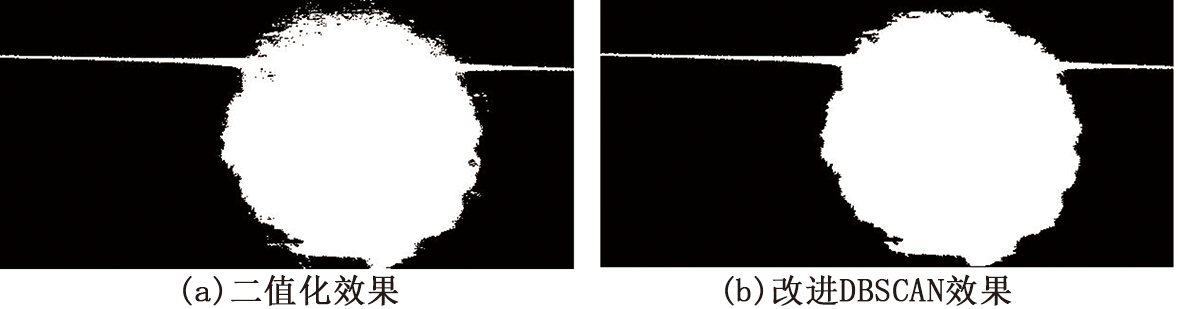
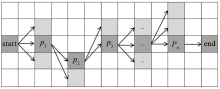
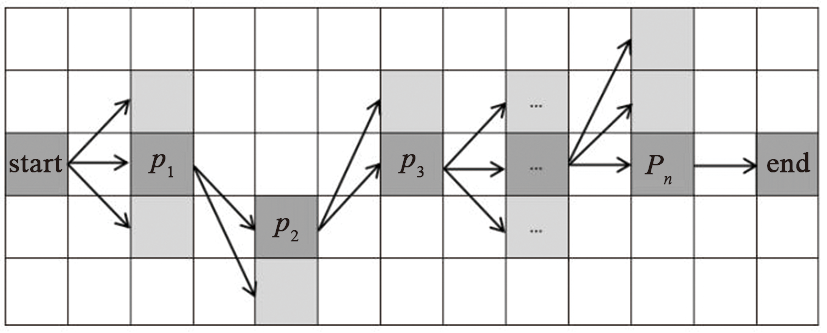
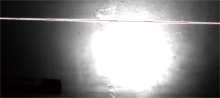
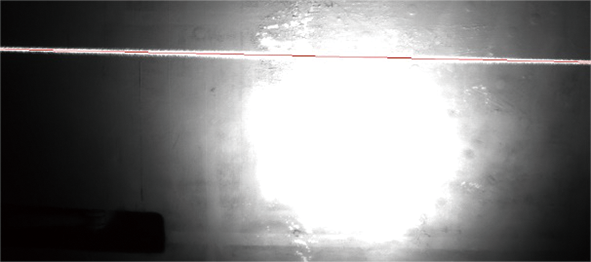
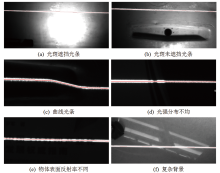
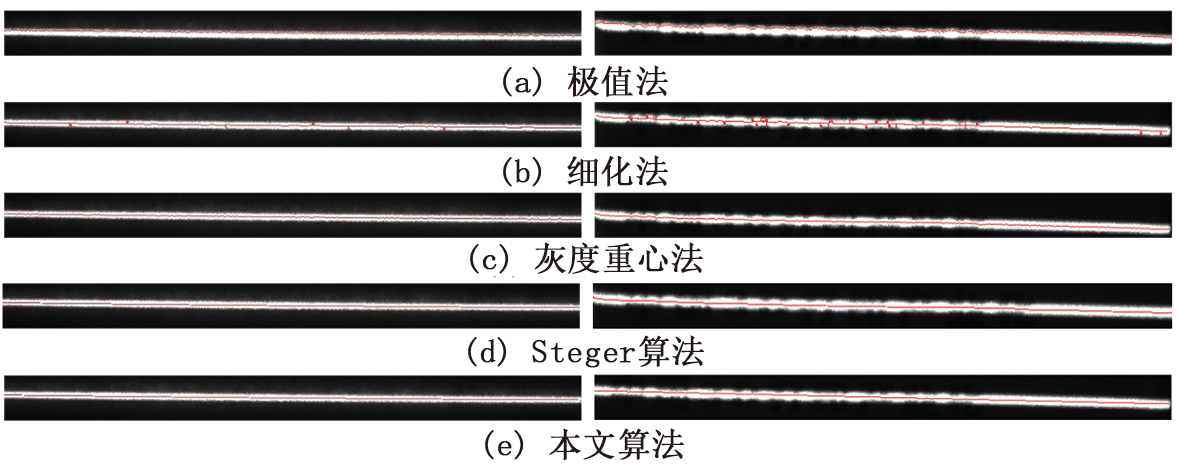
线结构光三维扫描建模系统中最关键的一步是提取光条中心线,但环境中各种因素的干扰给中心线提取带来困难。针对线结构光条纹图像存在光斑干扰、光强分布不均、光条宽度差别大、背景复杂等多种问题,提出解决方案。首先采用Otsu对结构光图像二值化;其次采用改进DBSCAN(density-based spatial clustering of applications with noise)算法保留核心点,去除边界点和噪声点;最后将核心点作为输入,构建图数据结构,采用适用于线结构光条纹图像的最短路径搜索算法得到光条中心线。实验结果表明,该算法运行时间在150 ms以内,误差在0.2 像素以内,并适用于多种复杂环境,满足实时性、准确性和稳定性的要求。
中图分类号:

开放获取 本文遵循知识共享-署名-非商业性4.0国际许可协议(CC BY-NC 4.0),允许第三方对本刊发表的论文自由共享(即在任何媒介以任何形式复制、发行原文)、演绎(即修改、转换或以原文为基础进行创作),必须给出适当的署名,提供指向本文许可协议的链接,同时表明是否对原文作了修改,不得将本文用于商业目的。CC BY-NC 4.0许可协议详情请访问 https://creativecommons.org/licenses/by-nc/4.0