山东科学 ›› 2023, Vol. 36 ›› Issue (6): 8-14.doi: 10.3976/j.issn.1002-4026.2023.06.002
刘进1( ), 谭华1,2,*(), 苏亮1, 仇国际1, 刘睿1, 罗崇鑫1, 王宇1, 刘豪1
), 谭华1,2,*(), 苏亮1, 仇国际1, 刘睿1, 罗崇鑫1, 王宇1, 刘豪1
LIU Jin1(), TAN Hua1,2,*(), SU Liang1, QIU Guoji1, LIU Rui1, LUO Chongxin1, WANG Yu1, LIU Hao1
摘要:
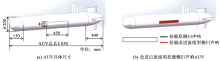
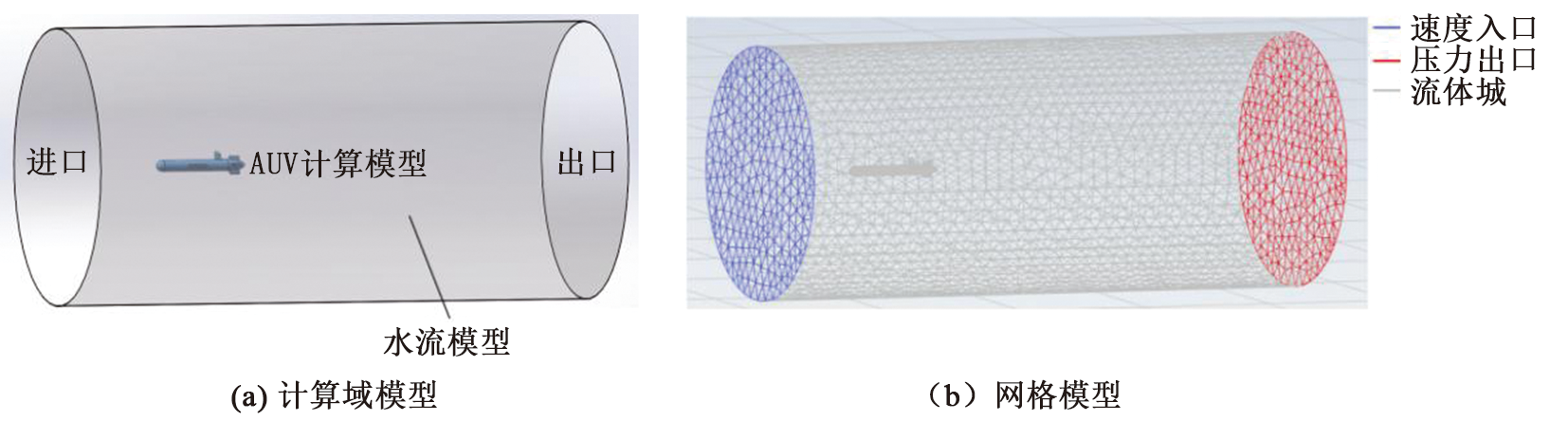
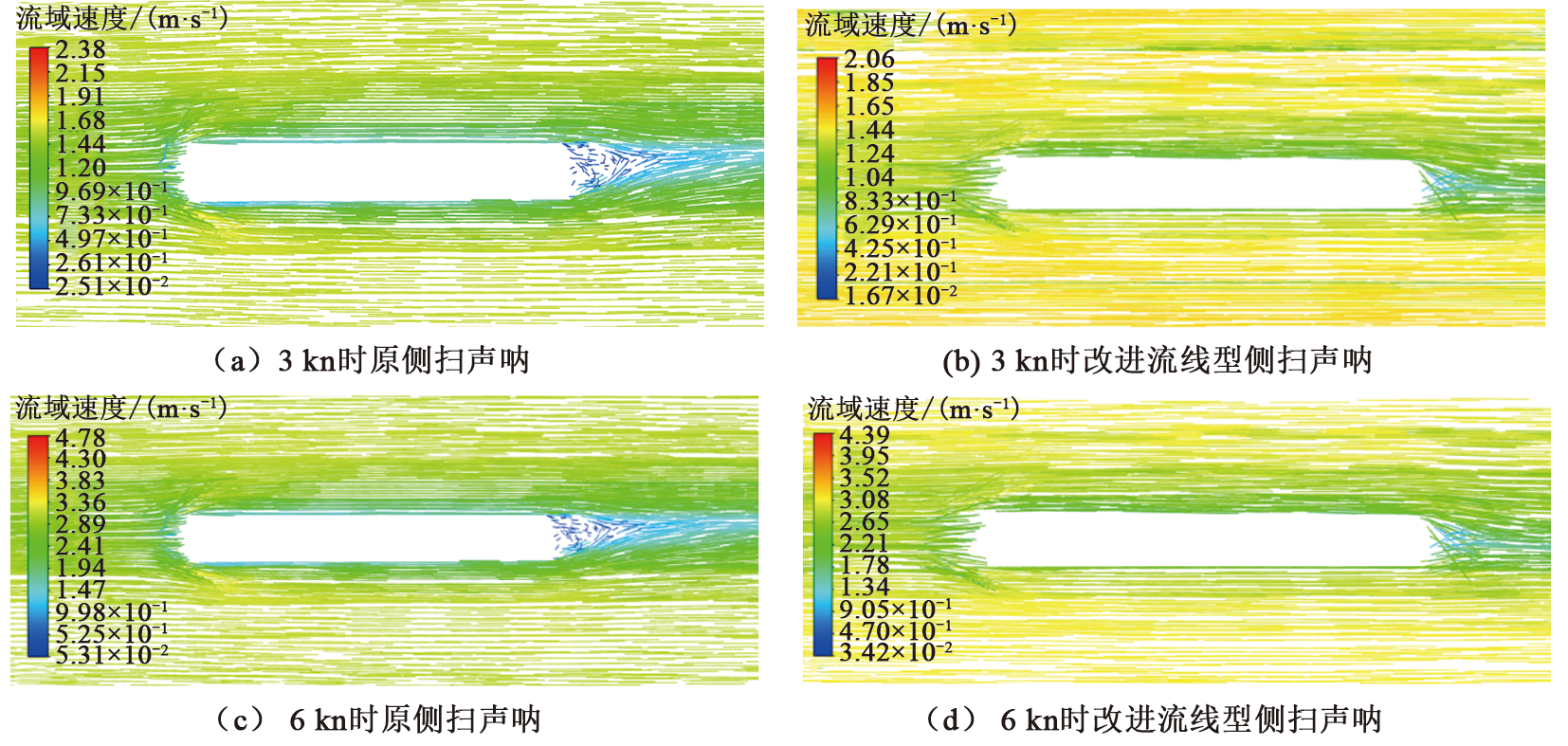
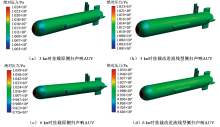
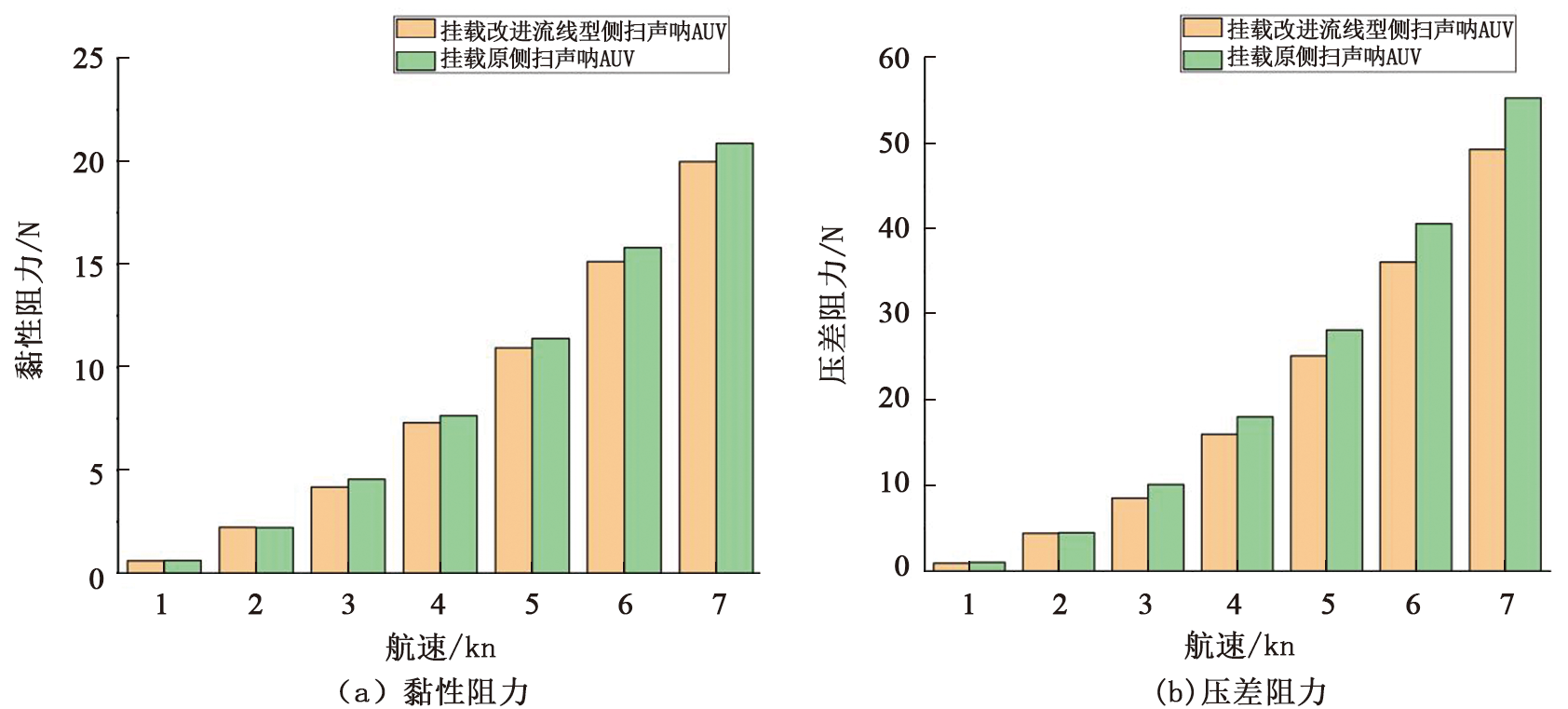
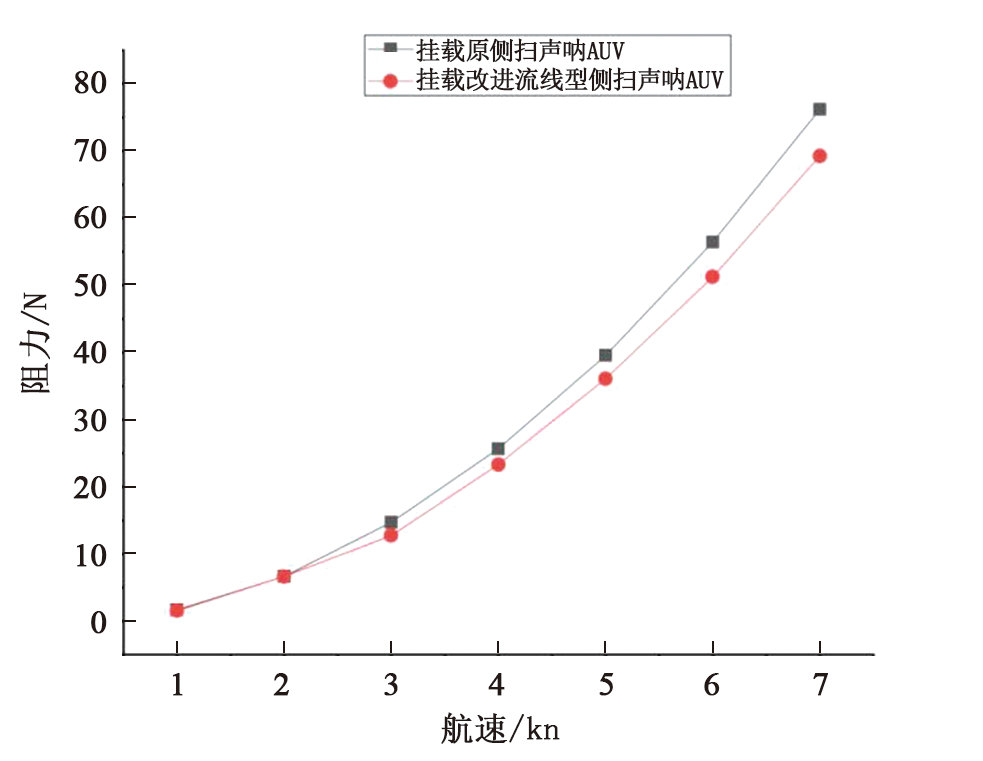
以某一挂载侧扫声呐的小型便携式自主水下机器人(AUV)为原型,对挂载侧扫声呐的AUV及挂载改进流线型侧扫声呐的AUV进行水动力分析。发现改进流线型侧扫声呐的AUV在正常航速3 kn和高航速6 kn下,得到了有效的阻力改善,包括黏性阻力和压差阻力的降低。在航速3 kn时,黏性阻力降低了9%,压差阻力降低了18%,总阻力降低了15.4%;在航速6 kn时,黏性阻力降低了4.2%,压差阻力降低了12%,总阻力降低了10.1%。这些结果表明,通过优化AUV挂载侧扫声呐的流线型,可以有效地提高AUV的动力性能,降低其阻力,从而提高AUV的性能和效率。
中图分类号: